L’avènement des robots et des systèmes d’intelligence artificielle induit des transformations profondes dans nos sociétés. Les chercheuses et les chercheurs de l’ISIR contribuent à les anticiper en travaillant sur l’autonomie des machines et leur capacité à interagir avec les êtres humains.
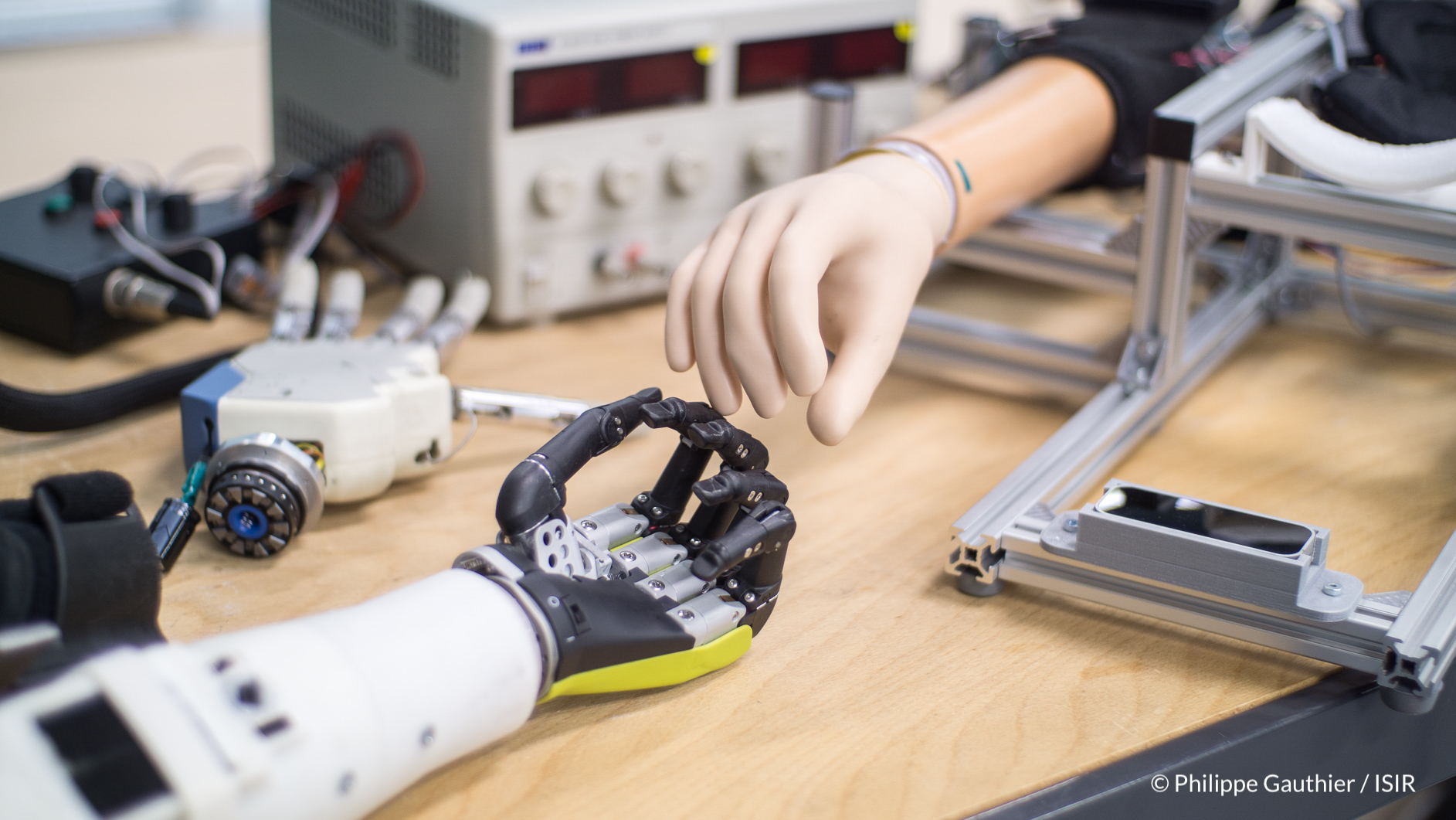
Rassemblés en équipes pluridisciplinaires, les chercheuses et les chercheurs créent des drones, micro-pinces, prothèses bioniques, robots sociaux, bras chirurgicaux et toutes sortes de systèmes intelligents et interactifs, physiques, virtuels ou de réalité mixte. Leurs applications adressent des enjeux sociétaux majeurs : santé, industrie du futur, transports, et service à la personne.
Nos recherches
Nous élaborons des modèles issus :
De l’ingénierie, pour caractériser le comportement dynamique de robots à haute mobilité en interaction physique complexe avec leur environnement.
Des neurosciences ou des sciences du mouvement humain, pour décrire les fonctions cognitives et sensori-motrices des êtres vivants et pour les exploiter dans la commande des robots.
De la psychologie, pour la caractérisation des comportements socio-interactifs des personnes humaines, entre elles ou avec des machines.
Nous concevons et réalisons :
Des systèmes robotiques, réels ou simulés, munis d’algorithmes de commande et de traitement de l’information, pour atteindre des capacités sensori-motrices, d’apprentissage, ou d’interaction supérieures à celles de l’état de l’art.
Des interfaces, pour optimiser l’interaction entre les personnes humaines et leurs environnements, numériques, physiques, ou mixtes.
Nous validons ces propositions :
Via des expériences qui reproduisent de façon réaliste l’environnement des applications visées, afin de vérifier leur robustesse (par exemple : santé, usine du futur, mobilité tous terrains).
Via des campagnes expérimentales impliquant des personnes humaines. Pour cela, nous définissons des protocoles rigoureux pour garantir la valeur scientifique des résultats, dans le respect des règles éthiques et des lois protectrices pour la personne.
Nos tutelles
L’ISIR est sous la double tutelle de Sorbonne Université qui est une Université pluridisciplinaire d’envergure mondiale et du Centre National de la Recherche Scientifique (CNRS) qui est une institution de recherche parmi les plus importantes au monde.
L’Institut national de la santé et de la recherche médicale (Inserm) est également tutelle de l’équipe AGATHE pour ses recherches médicales.
De part ces trois tutelles, l’ISIR est rattaché :
– Pour Sorbonne Université, à l’UFR919 d’Ingénierie relevant de la Faculté des Sciences et de l’Ingénierie ;
– Pour le CNRS, en rattachement principal à l’Institut CNRS Sciences Informatiques et, en rattachement secondaire, à l’Institut CNRS Biologie et à l’Institut CNRS Ingénierie ;
– Pour l’Inserm, l’équipe AGATHE est rattaché à l’Institut des Technologies pour la Santé de l’Inserm.
Valorisation et transfert
Recherche partenariale
L’ISIR est engagé dans de nombreuses collaborations avec des entreprises. Nous accompagnons nos partenaires pour renforcer leurs capacités d’innovation et gagner en compétitivité sur les nouveaux marchés qu’ouvrent, dans de nombreux secteurs d’activité, la robotique et l’intelligence artificielle.
Nos partenaires
Start-ups
Les chercheuses et chercheurs de l’ISIR sont également à l’origine de plusieurs start-ups, soit parce qu’ils s’engagent personnellement dans leur fonctionnement, soit parce qu’ils transfèrent des technologies via la cession de droits d’exploitation des inventions ou des savoir-faire.
Les start-ups issues de l’ISIR
Équipements et plateformes
Avec plus de 800 m² dédiés aux activités expérimentales, l’ISIR entretient l’un des parcs de robots les plus importants d’Europe.
Les plateformes expérimentales supportent les activités de toutes les équipes. Elles sont constituées de dispositifs disponibles dans le commerce, ou réalisés par le service technique dans nos ateliers. Vous souhaitez-les utiliser pour vos études de R&D ? C’est possible, contactez-nous.
Trois plateformes sont les supports de projets fédérateurs sélectionnés par son Conseil Scientifique et soutenus via des moyens mutualisés à l’ISIR :
– GRETA, un avatar virtuel doté de capacités d’interaction sociales multimodales,
– CoVR, une combinaison unique au monde de moyens de tracking et d’analyse de mouvement, de réalité virtuelle ou augmentée, et de mise en mouvement de l’environnement ou du sujet placé en immersion,
– Surgical Cockpit, un ensemble d’interfaces pour l’assistance aux gestes en chirurgie mini-invasive.
Les autres plateformes :
– La Plateforme de Robotique Sociale, qui regroupe, sur le campus de Jussieu et sur les sites hospitaliers de la Pitié Salpêtrière et de Charles Foix à Ivry, de nombreux moyens pour la mise en oeuvre et l’évaluation de mécanismes d’interaction sociale,
– La plateforme de micro-robotique qui intègre des moyens de manipulation aux échelles microscopiques et d’interface de pilotage avec retour haptique,
– La plateforme de robotique tous terrains et ses drones aériens, terrestres ou marins,
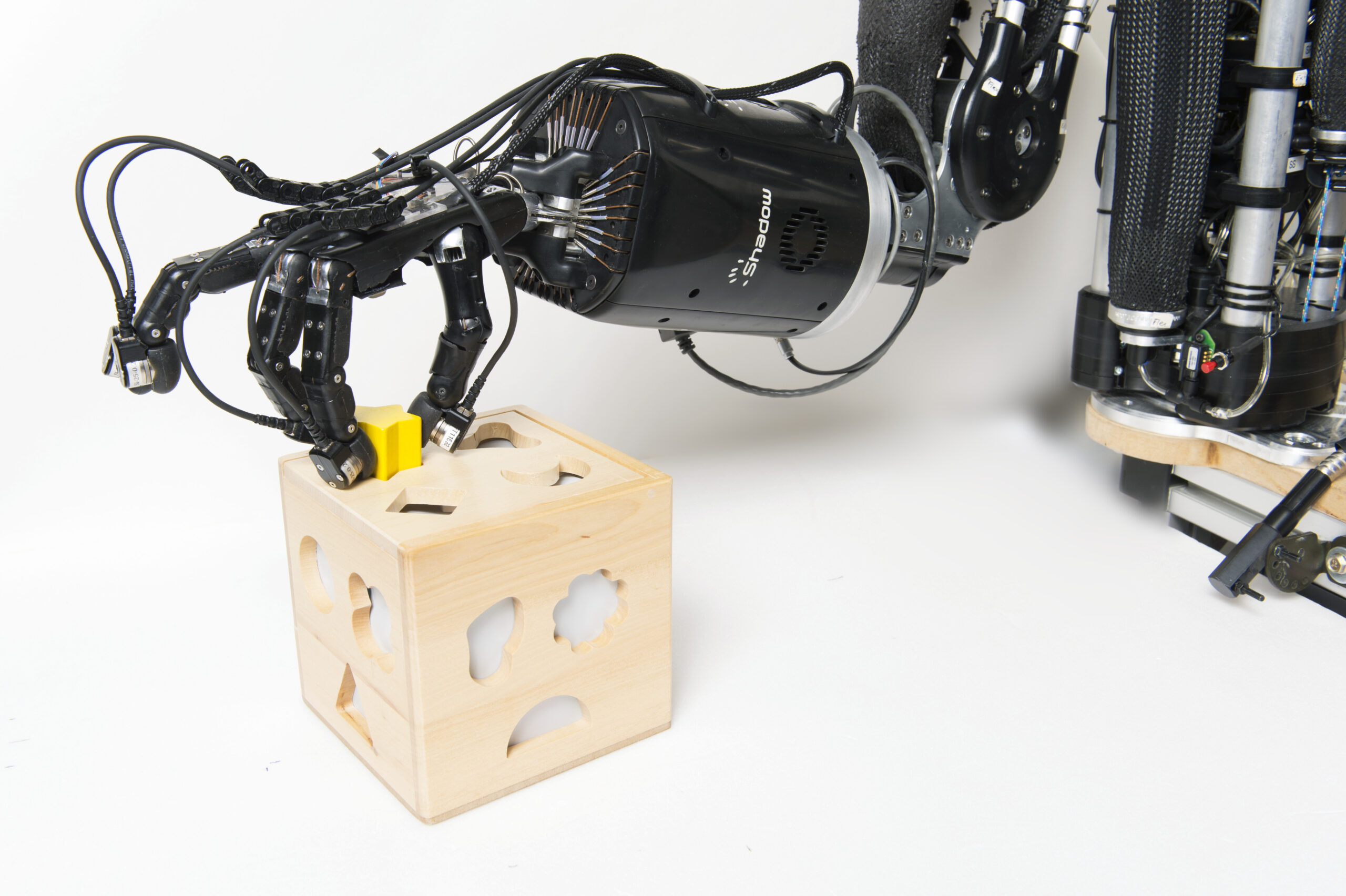
– La plateforme de robotique de manipulation, avec des dispositifs de manipulation à un ou deux bras couvrant une gamme de technologies très variée.
Nos 6 équipes

Comprendre comment les animaux, y compris les humains, perçoivent le monde, décident de leur actions, apprennent de leurs erreurs et réussites, interagissent entre eux et avec leur environnement : ces questions fondamentales sont au cœur de l’activité de recherche de l’équipe ACIDE. Elles nourrissent également des travaux visant à améliorer les interfaces humain-machine (ordinateurs, agents conversationnels, systèmes de réalité virtuelle, robots).
L’équipe ASIMOV travaille sur des problématiques liées à l’interaction des robots avec leur environnement. Les domaines de recherche concernent le contrôle de systèmes mécaniques complexes, dotés de capacités d’action et de perception, et soumis à des interactions physiques avec des environnements inconnus et dynamiques. L’objectif final est de relever les défis centrés sur la robotique de service en milieux ouverts.

L’équipe réuni des chercheurs et chercheuses en robotique, informatique, neuroscience et santé qui se retrouvent dans le projet de développer des dispositifs capables d’interagir avec l’humain dans sa variété de manière intuitive et synergique. La variété de l’humain suppose la capacité des dispositifs à s’adapter à des situations particulières (vieillissement, handicap, travail…). L’intuitivité et la synergie suppose de mieux comprendre comment l’humain perçoit et comprends l’interaction avec les dispositifs (objets, ordinateurs, robots), c’est pourquoi nous explorons les domaines de l’haptique, la neuroscience, le contrôle moteur, le contrôle et la modélisation computationnel pour mieux appréhender ces interactions sensorimotrices.

Les chercheurs et chercheuses de l’équipe MLIA travaillent en intelligence artificielle, sur la conception d’algorithmes d’apprentissage statistique. Leur recherche vise principalement à développer des algorithmes d’apprentissage profond, en lien avec des applications pour la robotique, la vision et le langage, les interactions humain-machine, et la modélisation de systèmes complexes en physique.
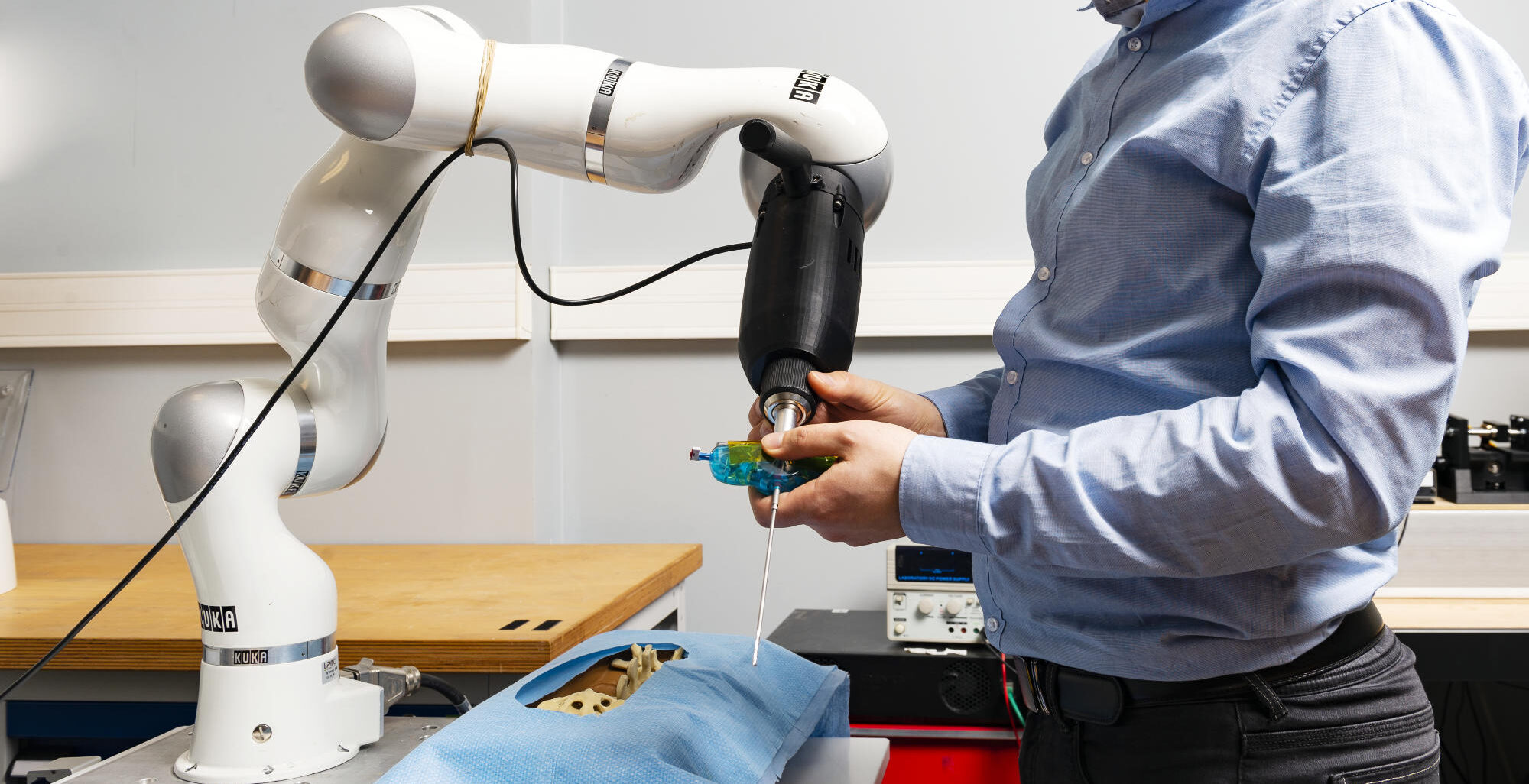
L’équipe RPI-Bio aborde plusieurs grands défis scientifiques qui s’articuleront autour de la microrobotique, la robotique chirurgicale, la perception multimodale, les IHM, la commande avancée de systèmes robotiques, l’apprentissage machine et humain et le transfert du geste expert (télé-expertise). Les avancées qui seront réalisées dans ces domaines permettront certainement de répondre au mieux aux besoins de la médecine et la biologie de demain.
