Actualités
Contact & accès
Intranet
ISIR
Présentation
L’institut en chiffres
Organigramme
Mission égalité-parité
Personnel
Équipes
ACIDE
Présentation
Projets
Publications
Membres de l’équipe
ASIMOV
Présentation
Projets
Publications
Membres de l’équipe
IRIS
Présentation
Projets
Publications
Membres de l’équipe
MLIA
Présentation
Projets
Publications
Membres de l’équipe
RPI-Bio
Présentation
Projets
Publications
Membres de l’équipe
Axes prioritaires
Ingénierie des Systèmes Intelligents
Systèmes Intelligents pour la Santé
Projets
Publications
Nous rejoindre
Opportunités
Témoignages de nos membres
Home
»
Projet
Projets
Équipe
All
ACIDE
ASIMOV
IRIS
MLIA
RPI-Bio
Type de projet
Tous les projets
Projets fédérateurs
OSTENSIVE
Les réponses émotionnelles aux sons des gestes tactiles affectifs organiques
Haptivance
Lexio Robotics
Audio-Touch
MAPTICS
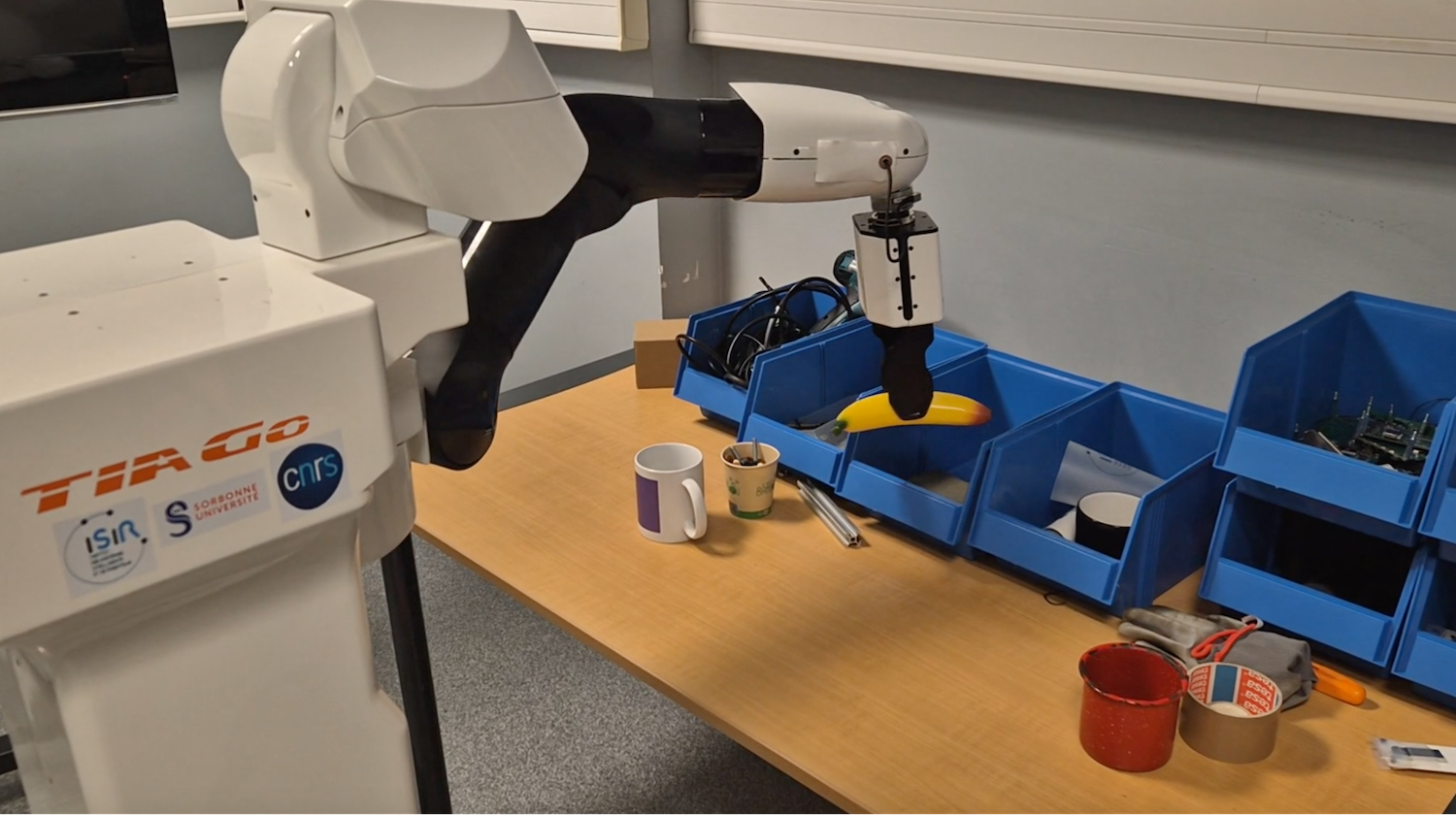
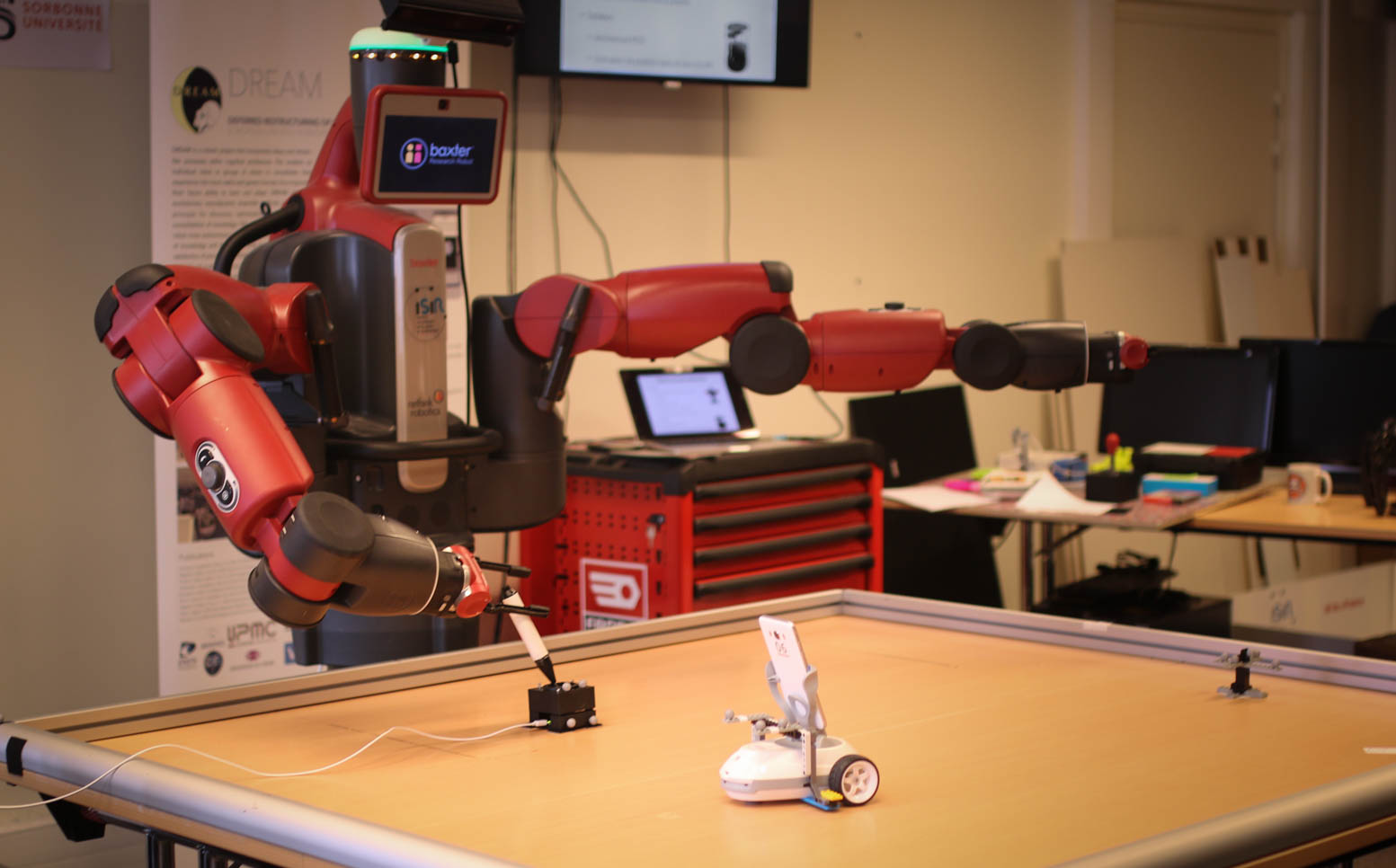
Apprentissage Robotique pour la Manipulation Mobile et l’Interaction Sociale
Open A-Eye
RODEO
Intégration multi-sensorielle pour le maintien de l’équilibre
FHF
TELIN
GUIDANCE
NeuroHCI
CoVR
Tralalam
CAVAA
ANITA
MaTOS
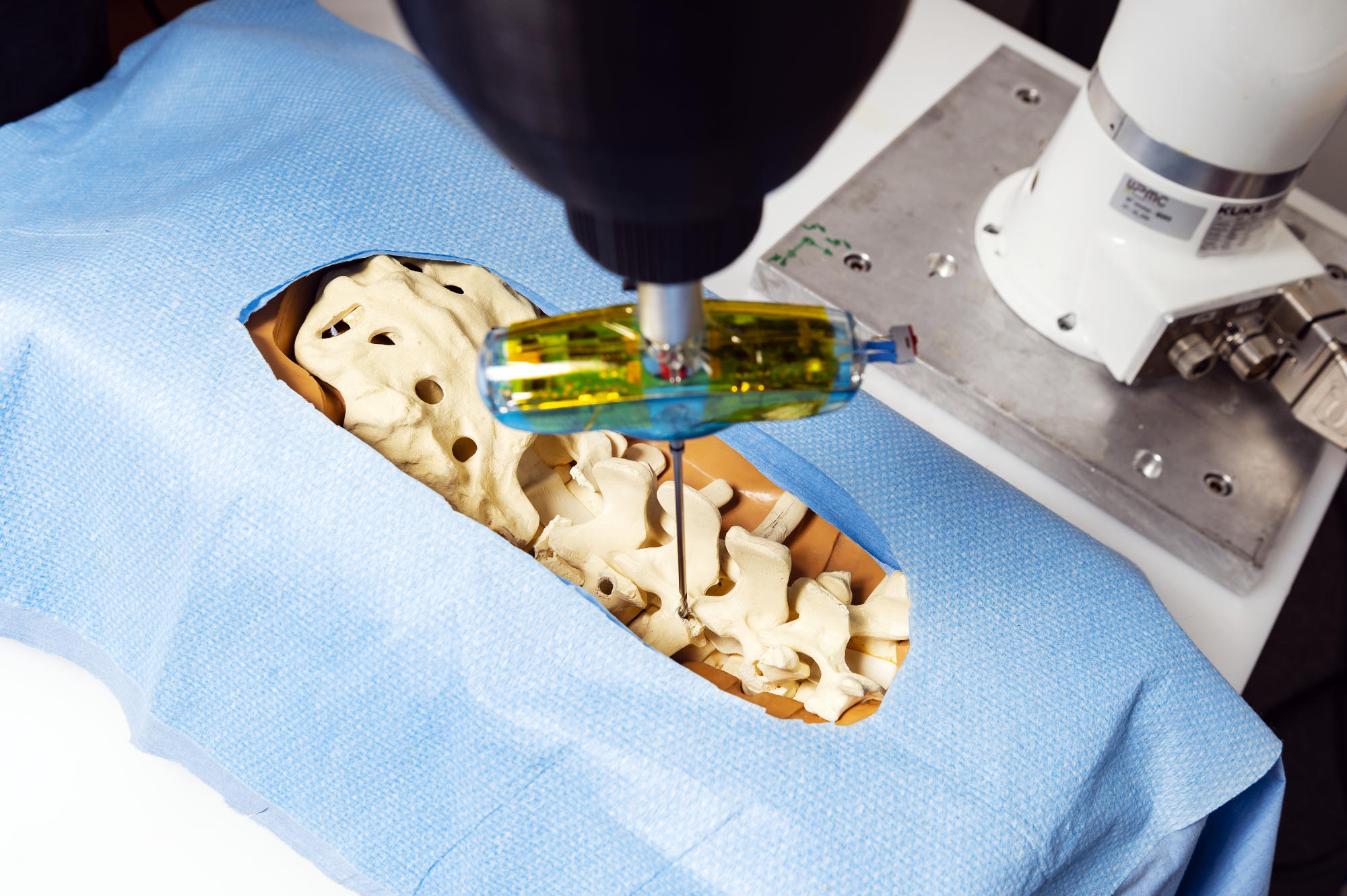
MARGSurg
VirtuAlz
Manipulateur souple pour la cueillette
Le langage et sa sémantique 
Learn2Grasp
COST
ADONIS
SESAMS
CORSMAL
ELSA
WAVY
ACDC
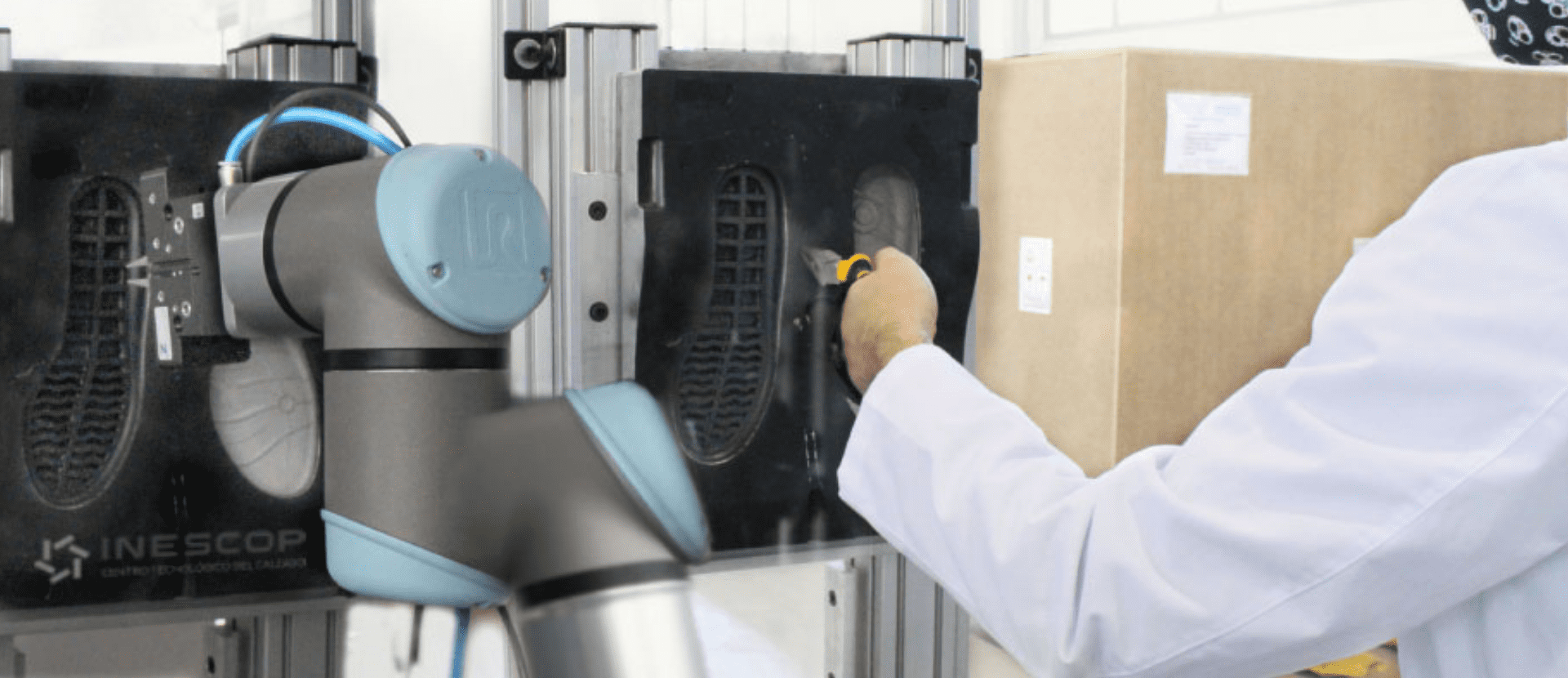
SOFTMANBOT
INDEX
Microrobots Mobiles
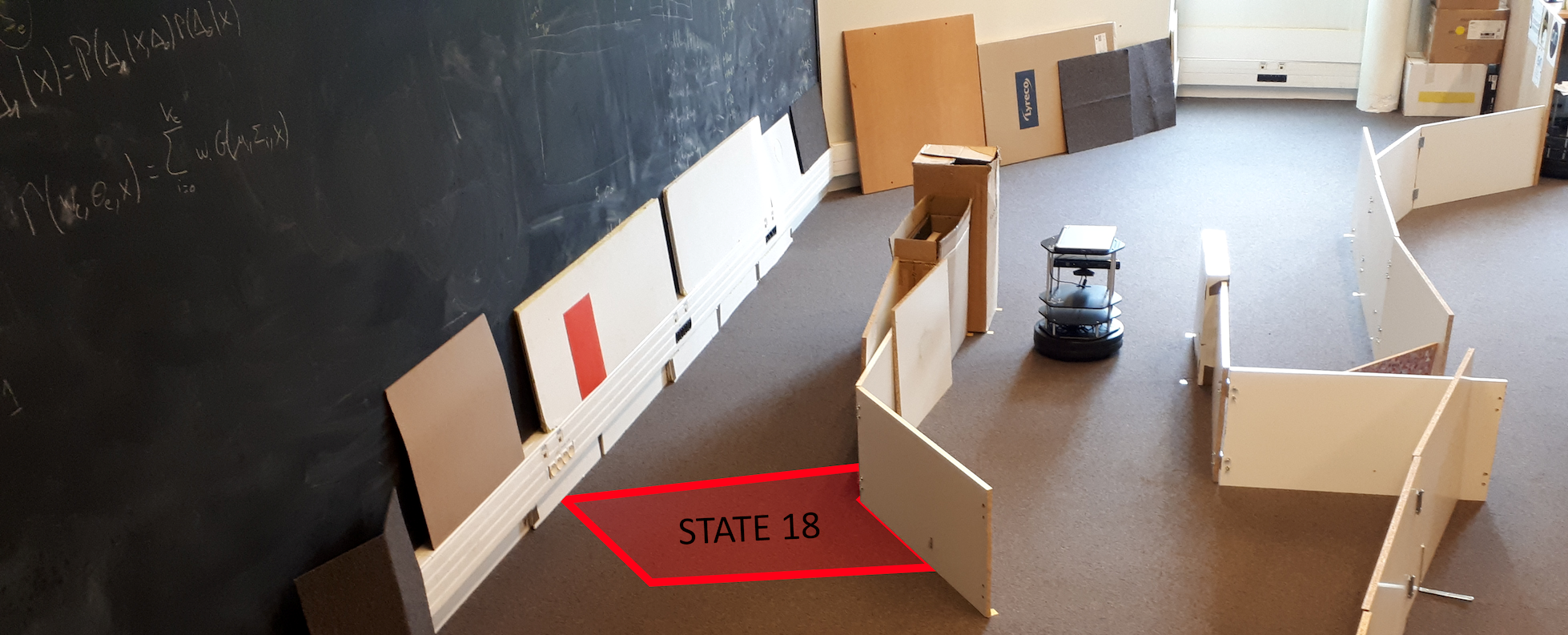
Apprentissage ouvert en robotique
TAPAS
PANORAMA
Coopération de système multiples d’apprentissage par renforcement
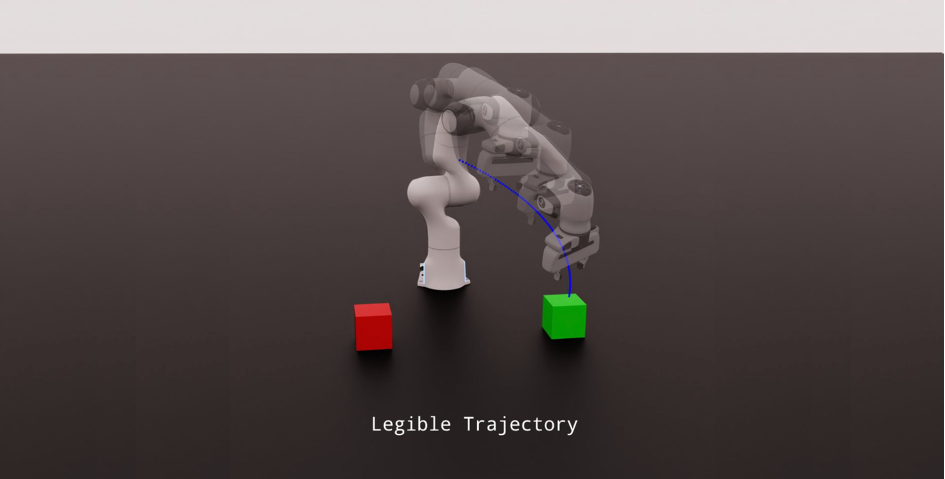
Lexikhum
muRocs
Cathétérisme Actif pour la Neuroradiologie
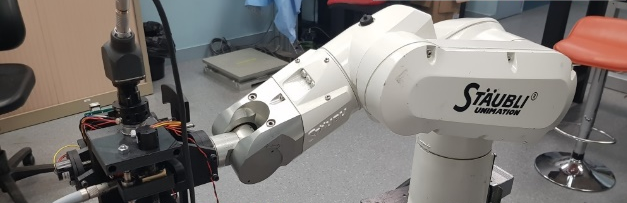
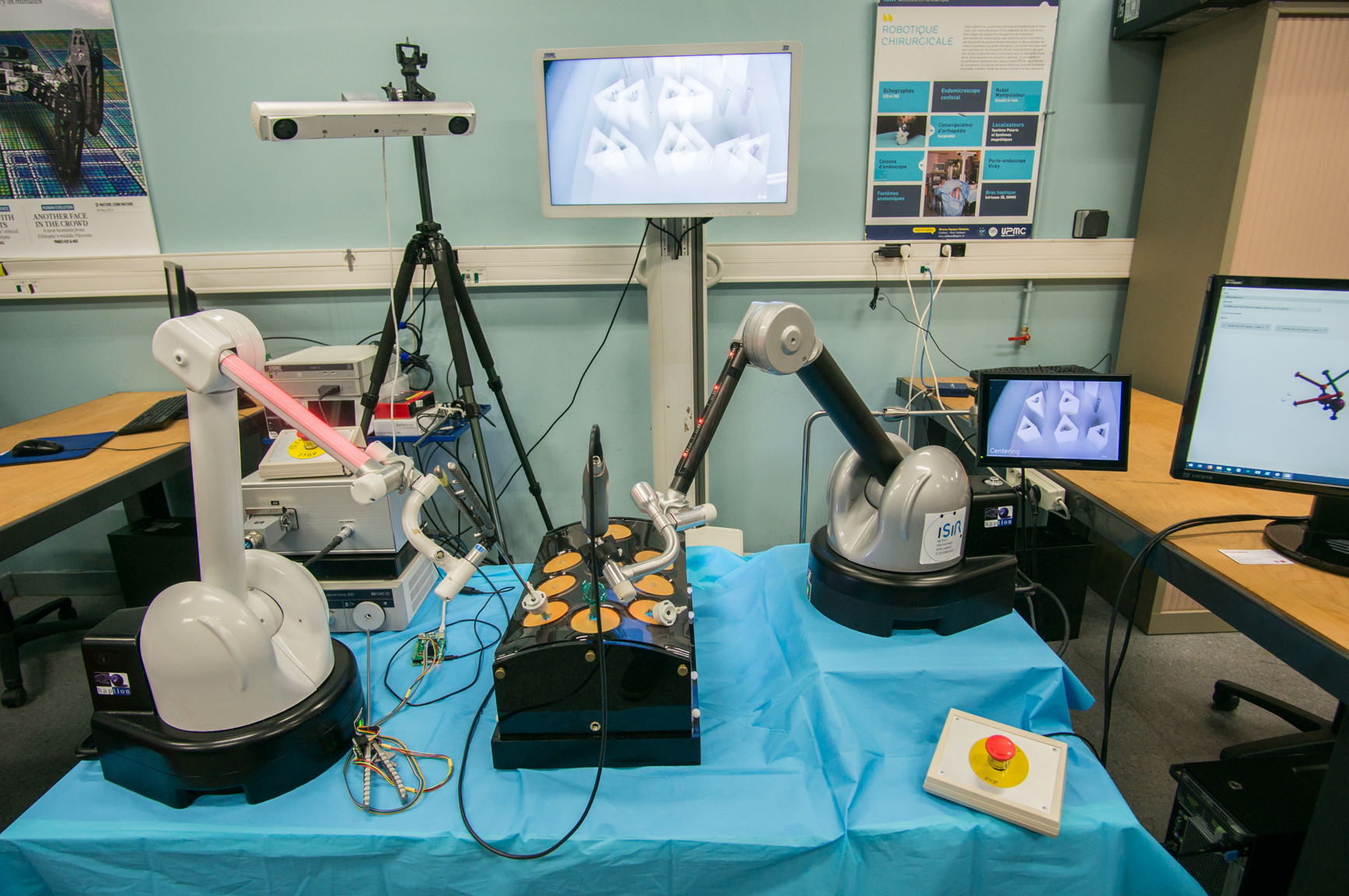
Cockpit chirurgical