Projet muRocs : Micro-chirurgie Robotisée du Cholestéatome
Les interventions chirugicales dans l’oreille moyenne (comme par exemple l’ablation d’un cholestéatome) sont fréquentes et très risquées. Aux difficultés manipulatoires s’ajoutent les problèmes liés à la vision indirecte par microscope. Dans le projet ANR muRocs, nous étudions la faisabilité d’une robotisation du geste de cholestéatomie. Celle-ci passe par la mise en œuvre d’un instrument fin type endoscope polyarticulé porté par un bras porteur. La tâche incombant à l’ISIR dans ce projet est de développer les moyens d’un interfaçage intuitif et performant entre l’opérateur et le système robotisé. En particulier, différents modes de pilotage sont comparés et l’utilisation de l’imagerie multimodale est explorée.
Le contexte
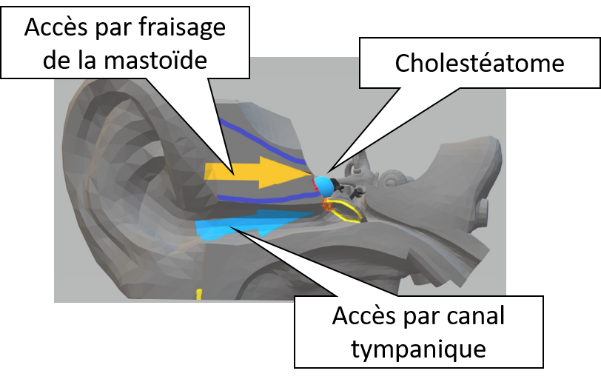
Le cholestéatome est une maladie grave de l’oreille moyenne dont l’incidence est de 1/10000 par an et qui consiste en une croissance cancéreuse des tissus pouvant aller jusqu’à atteindre le cerveau. Le traitement le plus efficace de la maladie à l’heure actuelle est l’opération chirurgicale. Celle-ci consiste à réséquer le cholestéatome (en grattant d’abord puis par ablation laser des résidus) en passant soit par le canal tympanique, soit par un passage fraisé dans la mastoïde. Cette opération est exemplaire des difficultés de la micro-chirurgie : accès étroit, outils peu maniables, tissus fragiles (nerf optique, chaîne tympano-ossiculaire), vision indirecte réduite. En conséquence, le taux d’échec est élevé (25%) et le besoin est grand d’amélioration de la procédure notamment en termes d’instrumentation. Le projet muRocs (consortium ANR PRC 2018, CHU Besançon porteur) vise à robotiser le geste de résection du cholestéatome pour le rendre moins invasif, moins risqué et plus performant. Dans ce projet, l’ISIR s’intéresse à l’ergonomie du nouveau système robotisé, en particulier en termes de commandabilité et d’immersion de l’opérateur dans la scène chirurgicale.
Les objectifs
– Nous souhaitons développer un système dextre capable d’accéder, par voie mini-invasive, à la cavité de l’oreille moyenne et d’atteindre tous les points de cette cavité avec une orientation choisie. Pour ce faire, nous nous orientons vers un ensemble macro-micro composé d’un bras manipulateur prolongé par un instrument fin polyarticulé type micro-endoscope.
– L’exploitation de la structure macro-micro redondante ci-dessus nécessite de mettre au point une interface de pilotage adaptée. Les solutions que nous envisageons de tester sont de deux types : les approches téléopérées et les approches co-manipulées.
– Dans le cadre de la cholestéatomie, il est primordial de parvenir à une résection totale du cholestéatome sous peine de prendre le risque d’une ré-opération du patient à court terme. Pour se faire, outre disposer d’un système robotique suffisamment dextre, il est nécessaire de disposer de moyens fins de visualisation et de repérage du tissu à reséquer. Les modalités endoscopique et OCT sont envisagées.
Les résultats
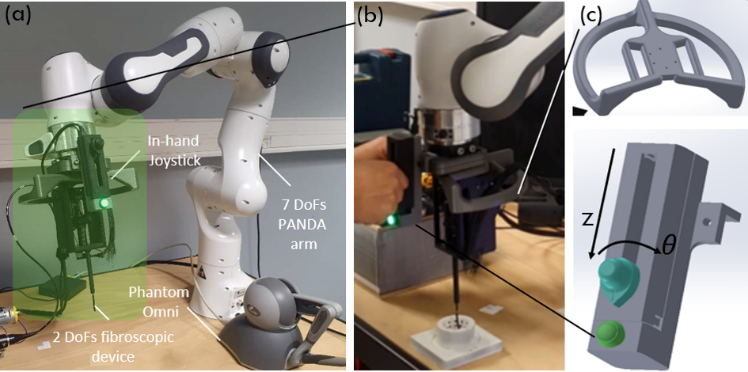
– Nous avons mis en œuvre un système macro-micro sériel composé du robot Franka à 7 ddl et d’un micro-endoscope de 3mm de diamètre et possédant 2 ddl. Le micro-endoscope a été motorisé et intégré à l’extrémité du bras porteur de façon à constituer une chaîne cinématique redondante à 9ddl entièrement commandable.
– Une étude est en cours pour évaluer différentes solutions de pilotage. Entre autres solutions, la téléopération directe de l’extrémité du dispositif via un joystick à 6 ddl nécessite d’être complétée par une gestion automatique des redondances cinématiques (mouvements internes). La comanipulation du dispositif via une poignée et un capteur d’effort sur le terminal du bras porteur doit quant à elle être complétée par un micro-joystick embarqué pour le pilotage des ddl intracorporels.
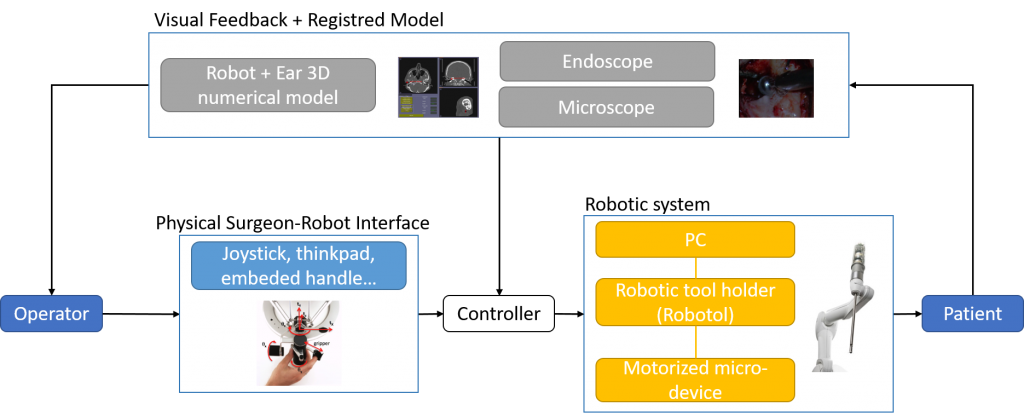
– Un premier retour visuel augmenté a été mis au point. Il fusionne les informations issues de la vision endoscopique et de la pose instantanée du robot. Il prend la forme d’une scène numérique 3D temps-réel du site d’opération. L’intégration de la modalité OCT via une sonde embarquée en bout d’instrument est à l’étude.
Partenariats et collaborations
muROCs (Micro-Robot for Cholesteatoma Surgery) est un projet ANR PRC 2018
Le consortium ANR muROCs est porté par le CHU de Besançon (Laurent Tavernier et Olivier Gaiffe).
Il comprend également :
– l’Institut Femto-ST (Nicolas Andreff et Kanty Rabenorosoa),
– l’Institut de l’audition (Yann Nguyen),
– l’ISIR.
Dans ce projet, les partenaires cliniques apportent leur expérience en chirurgie mini-invasive de l’oreille. En particulier, le Dr Nguyen est pionnier en matière de chirurgie robotisée de l’oreille moyenne car il fut un des premiers utilisateurs du robOtol, robot conçu à l’ISIR et commercialisé par la société Collin Médical. Le laboratoire Femto-ST est quant à lui en charge de développer un instrument dextre miniature capable d’atteindre tous les points du site opératoire. Cet instrument est basé sur la technologie hybride câbles – tubes concentriques.



