Project muRocs: Robotic microsurgery of cholesteatoma
Surgical interventions in the middle ear (such as the removal of a cholesteatoma) are frequent and very risky. In addition to the manipulative difficulties, there are problems related to the indirect vision by microscope. In the ANR muRocs project, we study the feasibility of a robotization of the cholesteatomy gesture. This involves the use of a fine instrument such as a polyarticulated endoscope carried by a support arm. The task of ISIR in this project is to develop the means of an intuitive and powerful interfacing between the operator and the robotized system. In particular, different piloting modes are compared and the use of multimodal imaging is explored.
Context
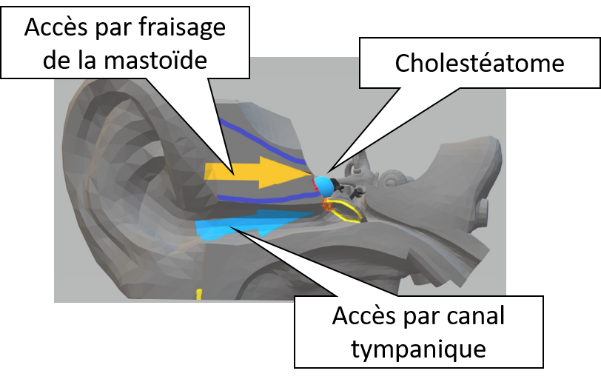
Cholesteatoma is a serious disease of the middle ear with an incidence of 1/10000 per year. It consists of a cancerous growth of tissue that can reach the brain. The most effective treatment of the disease at present is surgery. This consists of resecting the cholesteatoma (first by scraping and then by laser ablation of the residues) either through the tympanic canal or through a milled passage in the mastoid. This operation is an example of the difficulties of microsurgery: narrow access, unwieldy tools, fragile tissues (optic nerve, tympano-ossicular chain), reduced indirect vision. Consequently, the failure rate is high (25%) and there is a great need to improve the procedure, particularly in terms of instrumentation. The muRocs project (ANR PRC 2018 consortium, Besançon University Hospital) aims at robotizing the cholesteatoma resection procedure to make it less invasive, less risky and more efficient. In this project, ISIR is interested in the ergonomics of the new robotic system, in particular in terms of controllability and immersion of the operator in the surgical scene.
Objectives
– We wish to develop a dexterous system able to access, by mini-invasive way, the middle ear cavity and to reach all the points of this cavity with a chosen orientation. To do this, we are oriented towards a macro-micro assembly composed of a manipulator arm extended by a fine polyarticulated instrument of the micro-endoscope type.
– The exploitation of the above redundant macro-micro structure requires the development of an adapted control interface. The solutions we plan to test are of two types: teleoperated approaches and co-manipulated approaches.
– In the context of cholesteatomy, it is essential to achieve a total resection of the cholesteatoma or risk re-operation of the patient in the short term. In order to do so, in addition to having a sufficiently dexterous robotic system, it is necessary to have fine means of visualization and location of the tissue to be resected. Endoscopic and OCT modalities are considered.
Results
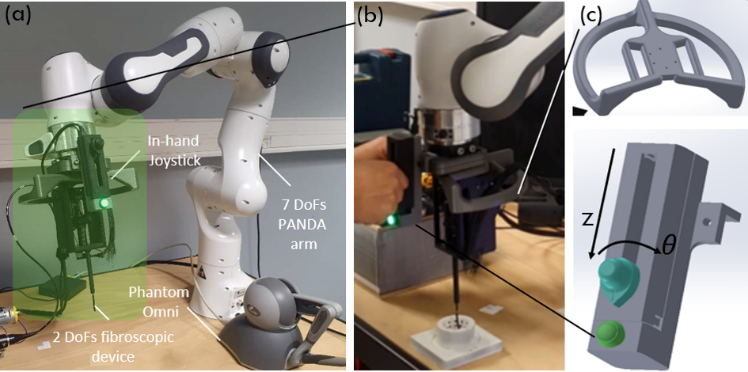
– We implemented a serial macro-micro system composed of the Franka robot with 7 ddl and a 3mm diameter micro-endoscope with 2 ddl. The micro-endoscope was motorized and integrated at the end of the carrier arm in order to constitute a redundant kinematic chain with 9 ddl fully controllable.
– A study is underway to evaluate different control solutions. Among other solutions, the direct teleoperation of the end of the device via a joystick with 6 ddl needs to be completed by an automatic management of the kinematic redundancies (internal movements). The comanipulation of the device via a handle and an effort sensor on the terminal of the carrying arm must be completed by an embedded micro-joystick for the piloting of the intracorporeal ddl.
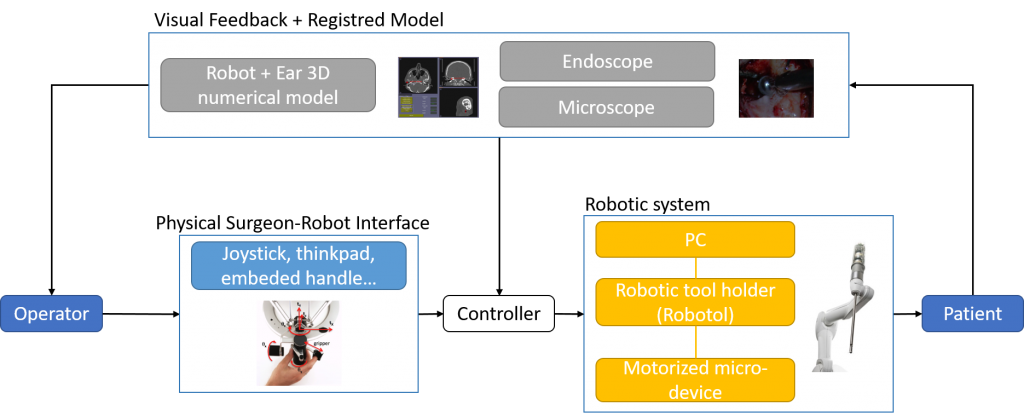
– A first augmented visual feedback has been developed. It merges the information from the endoscopic vision and the instantaneous pose of the robot. It takes the form of a real-time 3D digital scene of the operating site. The integration of the OCT modality via an embedded probe at the end of the instrument is under study.
Partnerships and collaborations
µROCs (Micro-Robot for Cholesteatoma Surgery) is an ANR PRC 2018 project.
The ANR µROCs consortium is led by the University Hospital of Besançon (Laurent Tavernier, Olivier Gaiffe).
It also includes:
– the Femto-ST Institute (Nicolas Andreff, Kanty Rabenorosoa),
– the Hearing Institute (Yann Nguyen),
– and the ISIR.
In this project, the clinical partners bring their experience in minimally invasive ear surgery. In particular, Dr Nguyen is a pioneer in robotic surgery of the middle ear as he was one of the first users of the robOtol, a robot designed at the ISIR and commercialized by the company Collin Médical. The Femto-ST laboratory is in charge of developing a miniature dexterous instrument capable of reaching all points of the surgical site. This instrument is based on the hybrid technology of cables and concentric tubes.



