
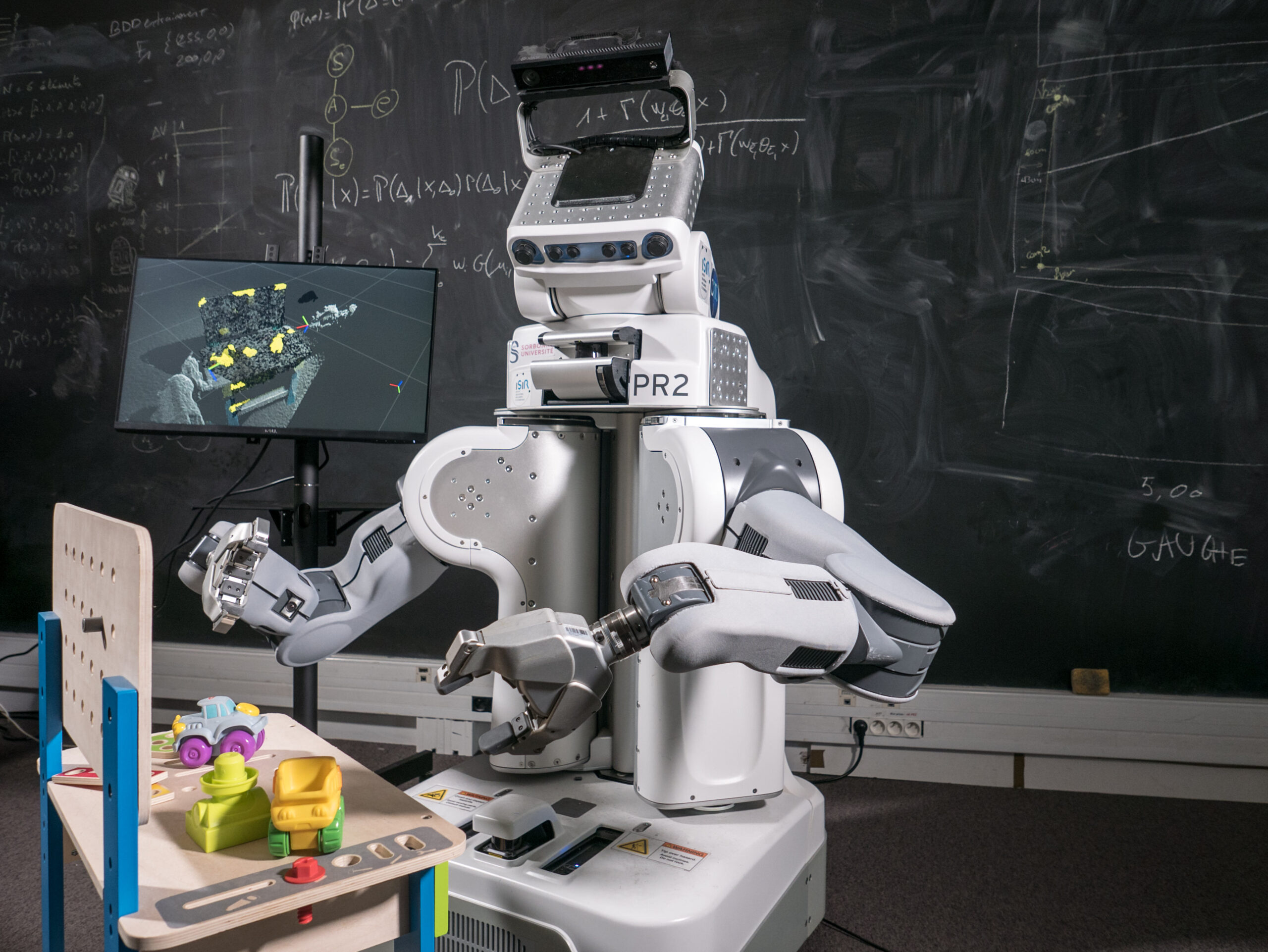
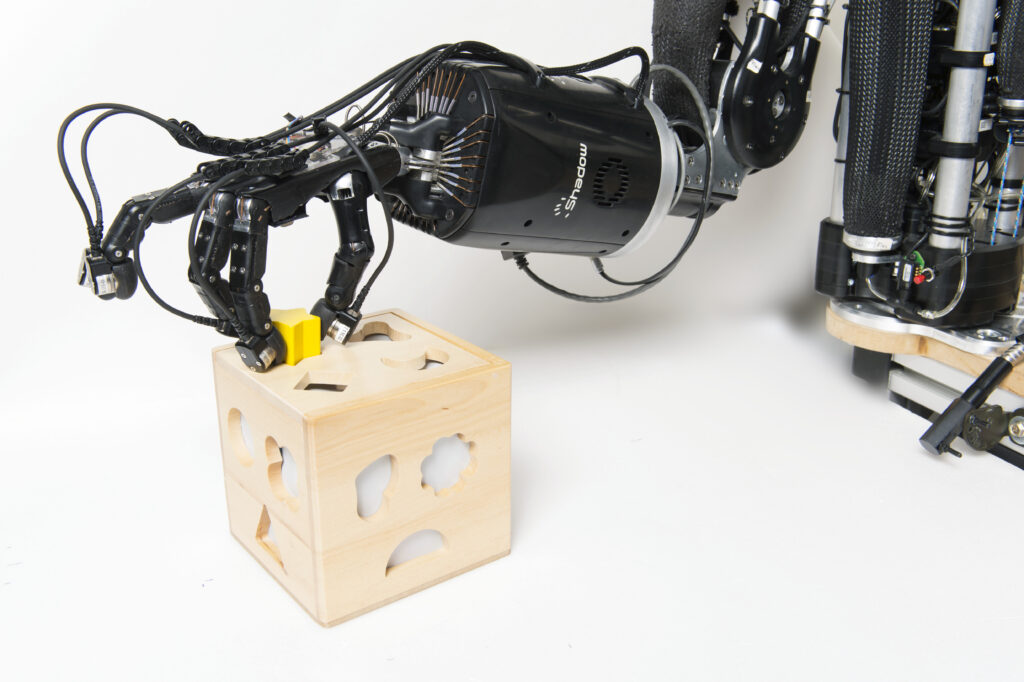
The ASIMOV team focuses on the interaction of robots with their environment. Our work aims to increase the autonomy of these systems, particularly in the context of manipulation tasks in complex, dynamic and partially unknown environments. The scientific aspects addressed include modeling, perception/control aspects, and the use of learning methods to solve these different problems.
Scientific issues
Modeling :
– Choice of models (physical models, hybrid models),
– Representation of the world and interaction,
– Identification/learning of these models.
Perception/control:
– Movement generation,
– Sensory-motor control loops,
– Human-robot collaboration/social integration,
– Perception of the environment and robot/environment interactions,
– Sensor data processing for control.
Learning :
– Cross-cutting theme,
– Simulation/reality gap,
– Development of hybrid methods,
– Learning by demonstration.
Scientific challenges
Service robotics in open environments:
– Context: robot complexity, unknown/dynamic environment, task diversity, on-board perception ;
– Challenges: precision, repeatability, adaptability, decision-making and real-time sensor data processing.
Scientific contact: Nizar Ouarti, ASIMOV team manager
