Projet ELSA – Apprentissage effectif des affordances sociales pour l’interaction humain-robot
« Étudier l’apprentissage d’affordances sociales chez les robots ». Les affordances sont des opportunités d’actions perçues par un agent pour interagir avec son environnement. Elles intéressent les roboticiens pour décrire les interactions potentielles du robot avec des objets au-delà des simples propriétés physiques.
Dans le projet ELSA, nous étendons la notion aux affordances sociales, qui n’ont pour l’instant été que peu étudiées en robotique. Ici, nous faisons les hypothèses suivantes :
– que les robots peuvent apprendre les affordances sociales de la même façon qu’ils apprennent des affordances dans des situations non-sociales ;
– que les robots, en apprenant à reconnaître de manière autonome les affordances sociales offertes par leurs partenaires humains, pourront répondre plus efficacement et de manière plus appropriée aux humains. Ceci permettrait ainsi de faciliter la coordination et la coopération entre humains et robots.
Le contexte
Le concept d’affordances est la capacité d’un objet ou d’un environnement à évoquer son utilisation ou sa fonction. Il attire progressivement l’attention des scientifiques en robotique et en Intelligence Artificielle (IA) comme un moyen de fournir aux agents artificiels plus d’autonomie, en leur permettant d’apprendre par eux-mêmes quelles commandes envoyées à leurs moteurs produisent des effets sur l’environnement.
Néanmoins, les avantages sociaux demeurent largement inexplorés en robotique et en IA. Si les affordances physiques représentent une étape vers des agents autonomes qui comprennent mieux leur environnement physique, les affordances sociales sont nécessaires pour évoluer vers des environnements multi-agents plus réalistes. Nous savons que les humains acquièrent des affordances sociales pour apprendre comment bien interagir avec les autres. Permettre aux robots de faire ce même type d’apprentissage leur permettrait de mieux interagir avec les humains.
Les objectifs
L’objectif central du projet est d’étudier les conditions qui permettent à un robot d’apprendre de manière efficace des affordances sociales, de façon à faciliter la communication et la coopération avec les humains. Nous allons en particulier étudier les problèmes liés aux affordances sociales en robotique, organisés en 4 lots de travail :
– Théorie et pratique des affordances sociales ;
– Les affordances sociales dans la prise de décision (dirigé par l’ISIR) ;
– Les affordances sociales pour l’exécution des actions ;
– Architecture, scénario, intégration.
Les résultats
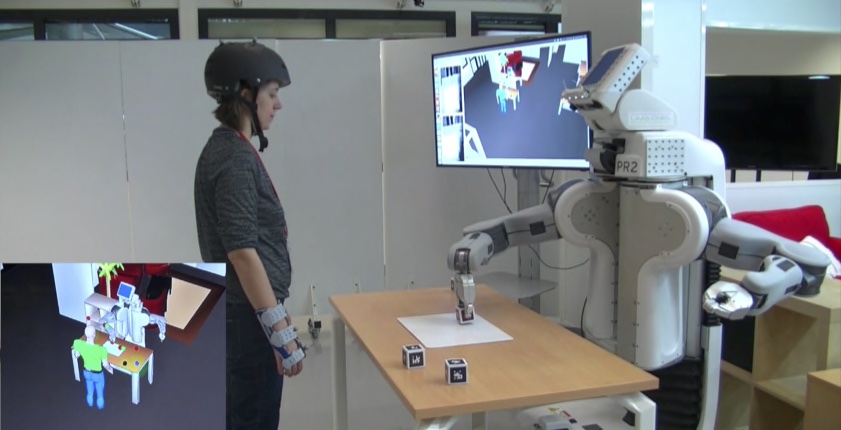
Le cadre applicatif principal de ce travail est celui de l’interaction humain-robot, et plus précisément de la coopération humain-robot. Mieux comprendre comment les robots peuvent apprendre à reconnaître et à exprimer des affordances sociales aiderait à contribuer à la conception de robots plus coopératifs avec l’humain. Cela permettrait alors de seconder l’humain dans une variété de tâches, comme la manipulation d’objets ou encore la navigation. Le projet contribuera également à d’autres retombées, notamment en termes de connaissances fondamentales sur la manière dont l’humain apprend, perçoit et exprime des affordances sociales. Mettre au point des algorithmes permettant à un robot d’apprendre des affordances sociales est une manière de proposer des modèles de la façon dont les humains font cet apprentissage.
D’une façon générale, le projet répond à un manque critique de connaissances de base sur la façon dont les affordances sociales sont apprises et utilisées dans le contexte de l’interaction humain-robot. L’atout majeur du projet est qu’il s’attaque à un sous-domaine relativement inexploré (les affordances sociales en robotique) qui s’appuie sur des domaines bien étudiés (les affordances non-sociales en robotique, mais aussi en psychologie).
Partenariats et collaborations
Le projet est coordonné par Mehdi Khamassi, Directeur de Recherche à l’ISIR. Le consortium du projet est composé de la manière suivante :
– L’ISIR, Sorbonne Université – France,
– LAAS-CNRS – France,
– Department of Computer Science (IFI), Université de Innsbruck – Autriche,
– Digital Science Center (DiSC), Université de Innsbruck – Autriche.



