
Cathéters pour la NRI actionnés par Alliages à Mémoire de Forme
Pour répondre aux besoins de contrôlabilité en matière d’instruments de neuroradiologie interventionnelle, nous avons développé une méthode brevetée de fabrication de cathéters actifs intégrant des fils en Alliage à Mémoire de Forme (NiTi). Une étape de modélisation poussée a permis d’optimiser les dimensions de ces cathéters actifs qui ont été ensuite testés et validés sur modèles silicone et sur modèle animal. Les plus petits prototypes réalisés présentent des diamètres de l’ordre du millimètre et des angles de courbure supérieurs à 90°. Aujourd’hui, cette technologie a été transférée via la start-up Basecamp Vascular qui industrialise le procédé mis au point.
Cathéters pour la NRI actionnés par Alliages à Mémoire de Forme
Le contexte
Le cathétérisme actif solution aux difficultés de la navigation endovasculaire
Actuellement, les cathéters utilisés en cardiologie ou en radiologie interventionnelle (par exemple pour l’embolisation des anévrismes cérébraux) sont des outils complètement passifs, introduits manuellement. De plus, le retour visuel offert aux radiologues durant l’intervention se réduit à des images radio de faible résolution et le plus souvent en 2D. Dans ce contexte, les cathéters sont difficilement contrôlables et leur progression est lente voire impossible jusqu’à la cible anatomique. En neuroradiologie par exemple (navigation jusqu’au cerveau), on estime à 20% le taux d’échec de la navigation du fait d’une anatomie trop tortueuse au niveau des troncs supra-aortique (carotide).
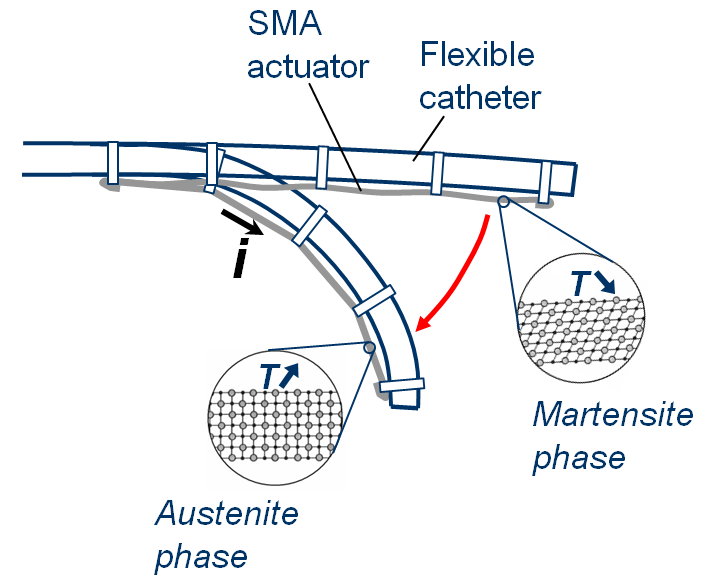
L’ISIR collabore avec le service de neuroradiologie interventionnelle (NRI) de la Fondation Ophtalmologique de Rothschild (FOR) depuis de nombreuses années sur le thème du cathétérisme actif pour la NRI. Le but du projet CATANE est de mettre au point et valider des cathéters motorisés, commandables dans leur partie distale pour améliorer les conditions de navigation artérielle : négociation des embranchements, pointage de la cible. L’approche retenue est celle des actionneurs miniatures à base d’Alliages à Mémoire de Forme (AMF) intégrés directement à l’extrémité des cathéters.
Les objectifs
– Nous visons la mise au point de techniques de réalisation robuste de cathéters ou guides actifs actionnés par fils en AMF intégrés en tête d’instrument. La principale difficulté rencontrée sur ce terrain est celle de la miniaturisation du dispositif d’accrochage des actionneurs à la périphérie de supports dont le diamètre avoisine le millimètre.
– Nous souhaitons également développer des modèles mathématiques du comportement des structures type cathéter ou guide actif. Le but ici est de parvenir à prédire le mouvement que produit une telle structure en réponse à une activation électrique donnée de manière à maîtriser la chaîne de conversion énergétique du signal de commande jusqu’au déplacement.
– Nous cherchons également à utiliser les modèles de comportement établis à des fins de conception optimale. L’actionnement par AMF a pour avantage une grande variabilité de solution en termes de nombre et de localisation des actionneurs. Nous souhaitons donc mettre au point des outils d’optimisation dimensionnelle et topologique des cathéters ou guides actifs pour répondre le plus efficacement possible à un besoin médical donné.
– Enfin, cette recherche adresse également la question de l’Interfaçe Homme-Machine (IHM) de ces dispositifs. Nous voulons proposer les meilleures interfaces de commande possibles dans un contexte d’instruments à multiple degré de mobilité (notamment actifs) et dans un contexte de visualisation de la scène opératoire rendue complexe par la vision radiographique intermittente. Cet aspect s’intègre parfaitement à la problématique générale du cockpit chirurgical développée dans l’équipe.
Les résultats
– Une méthode d’assemblage des cathéters/guides actifs à base de fils en AMF a été mise au point et brevetée. Sur la base de ce procédé différents prototypes ont été réalisé lesquels ont montré de bonnes performances, en particulier en termes de temps de réponse (~1s) et de durée de vie (>100 cycles d’activation). La méthode de réalisation a été brevetée à l’international (WO2011116961A1) et une licence exclusive d’exploitation a été accordée à la société Basecamp Vascular.
– Un modèle analytique de la fonction de transfert de nos cathéters/guides actifs a été développé et validé expérimentalement. Ce modèle a servi de base pour le dimensionnement de dispositifs variés correspondant à des spécialités médicales et des tâches de navigation différentes et présentant chacune des exigences particulières : neuroradiologie interventionnelle, chirurgie vasculaire, intervention des voie billio-pancréatiques.
– Ces dispositifs ont été validés expérimentalement sur fantôme anatomique (par exemple cathéter miniature de diamètre 1,2mm à deux actionneurs AMF pour la navigation dans le réseau artériel crânien) ou sur modèle animal (par exemple un guide actif de diamètre 2,1mm à deux courbures en série pour la navigation dans l’aorte abdominale et ses ramifications.
Partenariats et collaborations
La société Basecamp Vascular industrialise les cathéters actifs de l’Isir.
Le projet CATANE a tout d’abord été soutenu par le labex CAMI (Computer Assisted Medical Interventions) qui a financé le recrutement d’un ingénieur en 2013 puis par la SATT Lutech sous forme d’une aide à la maturation entre 2014 et 1015. Aujourd’hui, les technologies développées et en particulier celle décrite dans le brevet WO2011116961A1, ont été transférées à la start-up Basecamp Vascular créée en 2016. Son président est le Dr Raphaël Blanc, neuroradiologue interventionnel à la Fondation ophtalmologique Rothshild à Paris. Le Dr Blanc est associé au projet CATANE depuis son origine.

