
Catheters for INR operated by Shape Memory Alloys
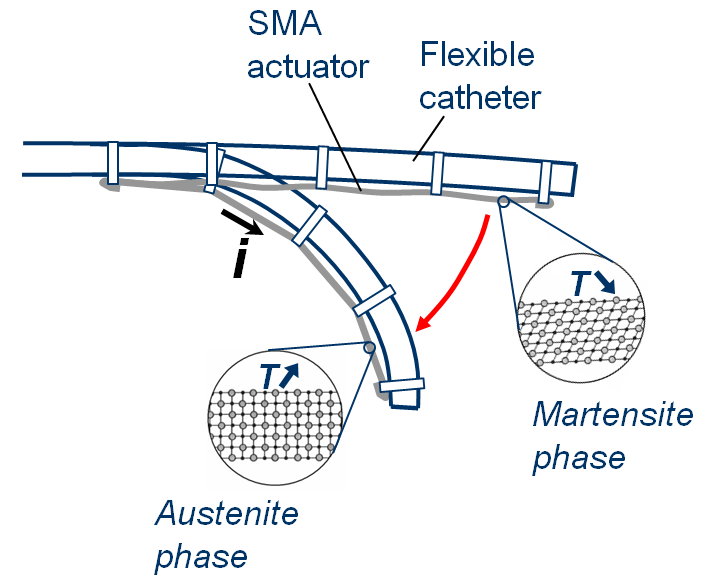
To meet the need for controllability in interventional neuroradiology devices, we have developed a patented method for manufacturing active catheters incorporating Shape Memory Alloy (NiTi) wires. An advanced modeling step allowed us to optimize the dimensions of these active catheters which were then tested and validated on silicone and animal models. The smallest prototypes produced have diameters of the order of one millimeter and angles of curvature greater than 90°. Today, this technology has been transferred via the start-up Basecamp Vascular, which is industrializing the developed process.
Catheters for INR operated by Shape Memory Alloys
Context
Active catheterization as a solution to the difficulties of endovascular navigation
Currently, the catheters used in cardiology or interventional radiology (for example for the embolization of cerebral aneurysms) are completely passive tools and are manually introduced. In addition, the visual feedback offered to radiologists during the intervention is reduced to low-resolution radio images, most often in 2D. In this context, catheters are difficult to control and their progression is slow or even impossible until the anatomical target. In neuroradiology, for example (navigation into the brain), it is estimated that the navigation failure rate is 20% due to an anatomy that is too tortuous at the level of the supra-aortic trunks (carotid).
ISIR has been collaborating with the interventional neuroradiology department of the Rothschild Ophthalmological Foundation (FOR) for many years on the theme of active catheterization for INR. The aim of the CATANE project is to develop and validate motorized catheters, controllable in their distal part to improve the conditions of arterial navigation: negotiation of the branches, pointing of the target. The chosen approach is that of miniature actuators based on Shape Memory Alloys (SMA) directly integrated at the tip of the catheters.

Objectives
– We aim at developing robust techniques for the realization of active catheters or guides actuated by SMA wires integrated in the head of the instrument. The main difficulties encountered in this field are the miniaturization of the device and the attaching of the actuators to the periphery of the support whose diameter is close to one millimeter.
– We also wish to develop mathematical models of the behavior of catheter or active guide structures. The goal here is to predict the movement that such a structure produces in response to a given electrical activation in order to control the energy conversion chain from the control signal to the displacement.
– We also seek to use the established behavioral models for optimal design purposes. SMA actuation has the advantage of a large variability of solution in terms of number and location of actuators. We therefore wish to develop tools for dimensional and topological optimization of active catheters or guides to meet medical needs as efficiently as possible.
– Finally, this research also addresses the issue of the Human Machine Interface (HMI) of these devices. We want to propose the best possible control interfaces in a context of instruments with multiple degrees of mobility (especially active ones) and in a context of visualization of the surgical scene made complex by the intermittent radiographic vision. This aspect fits perfectly with the general problem of the surgical cockpit developed in the team.
Results
– A method for assembling active catheters/guides based on SMA wires has been developed and patented. On the basis of this process, different prototypes have been realized which have shown good performances, in particular in terms of response time (~1s) and lifetime (>100 activation cycles). The method has been patented internationally (WO2011116961A1) and an exclusive license has been granted to Basecamp Vascular.
– An analytical model of the transfer function of our active catheters/guides has been developed and experimentally validated. This model was used as a basis for the design of various devices corresponding to different medical specialties and navigation tasks, each with specific requirements: interventional neuroradiology, vascular surgery, billio-pancreatic intervention.
– These devices have been experimentally validated on anatomical phantoms (e.g. a miniature catheter of 1.2mm diameter with two AMF actuators for navigation in the cranial arterial network) or on animal models (e.g. an active guide of 2.1mm diameter with two active flexions for navigating in the abdominal aorta and its branches).
Partnerships and collaborations
Basecamp Vascular industrializes the ISIR active catheters.
The CATANE project was first supported by the CAMI labex (Computer Assisted Medical Interventions) which financed the recruitment of an engineer in 2013 and then by the SATT Lutech in the form of a maturation grant between 2014 and 2015. Today, the technologies developed and in particular the one described in patent WO2011116961A1, have been transferred to the start-up Basecamp Vascular created in 2016. Its president is Dr. Raphaël Blanc, interventional neuroradiologist at the Rothshild Ophthalmological Foundation in Paris. Dr. Blanc has been associated with the CATANE project since its inception.

