Ce projet vise le développement d’un manipulateur souple pour la cueillette. La cueillette de fruit ou de légume nécessite une préhension compliante et dextre pour garantir l’intégrité de l’objet ainsi qu’une structure porteuse souple pour pouvoir naviguer entre les branches sans les abimer. L’objectif est de développer un robot trompe continu sans articulation et actionné par des moteurs déportés et des câbles, à l’image des tendons dans une main humaine. Le projet se décline en 3 principales problématiques bien connues dans le domaine de la robotique, à savoir la conception, la modélisation et la commande. Ces 3 aspects sont en réalité très imbriqués pour ce genre de systèmes complexes. Une bonne conception avec une bonne intégration des actionneurs et des capteurs facilite énormément la commande par le biais d’une modélisation adéquate qui répond à la fois à un certain réalisme et une efficacité de calcul.

Le contexte
Dans un contexte de lutte contre le réchauffement climatique et de convergence technologique inédite (numérique, intelligence artificielle, …), l’agriculture doit se réinventer pour produire mieux, dans le respect de l’environnement et de la santé humaine. La robotique agricole est l’un des leviers de cette transformation. Elle constitue une solution prometteuse pour répondre aux enjeux environnementaux et sanitaires, qui sont posés actuellement en France et ailleurs dans tous les pays développés. L’urgence climatique imposera une réduction de plus en plus forte de l’utilisation des intrants (produits phytosanitaires, eau, etc.) et des énergies fossiles. Par ailleurs, la filière agricole souffre d’un manque d’attractivité et d’une image négative chez beaucoup de jeunes (ruralité, tâches répétitives, épuisement, difficultés économiques, isolement, etc.). La numérisation et la robotisation permettront la valorisation de ce métier et déchargera l’agriculteur des tâches répétitives et fatigantes telles que le désherbage, le portage, la cueillette et l’entretien régulier des cultures.
Les objectifs
L’objectif scientifique majeur est de pouvoir répondre aux trois problématiques que sont la conception, la modélisation et la commande, dans une approche simultanée et intégrée, parfois dite de co-design (hardware et software).
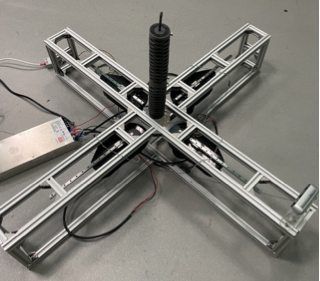
Le robot visé s’apparente à une trompe, d’environ un mètre, capable d’adopter plusieurs configurations stables de manière continue. Le laboratoire dispose de deux prototypes de manipulateurs souples continus pour mettre en œuvre différentes solutions. Le premier est constitué d’une colonne vertébrale en fils métalliques tressés et de disques en matériau à faible friction pour le passage des câbles. On utilise un actionnement par câbles en nylon et des servo-moteurs contrôlés en force pour garantir la tension dans le câble dans un intervalle donné. Le second est en TPU imprimé et utilise une structure de câbles antagonistes (un moteur actionne deux câbles antagonistes). Cette solution permet de garantir naturellement une tension minimale dans les câbles à chaque instant.
Deux principales voies sont étudiées concernant la commande de ces manipulateurs. Le manipulateur en fils métalliques tressés implémente actuellement un contrôle en boucle ouverte basé sur les données. L’exploration de son environnement a été réalisée pour apprendre, via un réseau de neurones, le modèle géométrique inverse (longueur de câbles à tirer en fonction de la position 3D de l’effecteur). Le manipulateur en TPU implémente quant à lui un contrôle basé sur la perception. L’idée est de reconstruire sa forme dans l’espace à l’aide de caméras stéréo pour pouvoir contrôler l’effecteur.
Les résultats
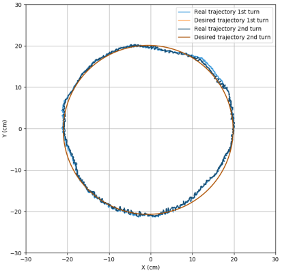
Les récents résultats ont démontré que l’utilisation d’un contrôle basé sur les données était tout à fait applicable dans le cas des manipulateurs souples actionnés par câbles. Que ce soit pour des tâches statiques (tâche de Reaching) ou dynamiques (suivi de trajectoires), la précision obtenue est suffisante. De plus, l’étude de la robustesse et de la répétabilité du système a démontré sa capacité à réaliser n’importe quelle tâche dans son environnement de travail de manière répétitive avec une variabilité millimétrique.
Partenariats et collaborations
Les membres du réseau Roboterrium – Equipex Tirrex sont partenaires du projet.