
Le contexte
Les microrobots mobiles est un domaine de recherche hautement prometteur. Le fil conducteur est de créer des micro-structrures non-attachés capables de naviguer et d’effectuer des tâches spécifiques de manière non invasive dans des sites difficiles d’accès, comme les organes in-vivo, ou à l’intérieur de dispositifs microfluidiques confinés, in-vitro, par exemple pour manipuler des cellules vivantes. Outre les applications axées sur la biologie, il existe également des cas d’usages plus classiques tels que l’assemblage et la caractérisation de petits échantillons et de micromachines.
Les techniques de fabrication à l’échelle microscopique sont relativement récentes, et l’actionnement et l’instrumentation sans fil des microrobots constituent un véritable défi. La technologie actuelle n’est pas encore suffisamment avancée pour fabriquer des systèmes autonomes de moins d’un millimètre dotés de toutes ces caractéristiques. Il existe cependant des phénomènes physiques qui peuvent être exploités pour propulser et contrôler à distance de tels dispositifs.
Les objectifs
Nous étudions et développons :
– des techniques d’actionnement et de détection pour les microrobots non attachés,
– différentes stratégies pour leur contrôle et leur navigation, qu’ils soient autonomes ou téléopérés.
Nous nous concentrons principalement sur deux technologies d’actionnement : magnétique et optique. Nous travaillons également sur la détection basée sur la vision, le contrôle et la téléopération haptique de tels systèmes.
(1) Technologie d’actionnement magnétique
La possibilité de contrôler des capsules magnétiques fabriquées à une micro-échelle ouvrirait un large éventail d’applications. Les cavités du corps peuvent être atteintes : des fluides stagnants peuvent être trouvés dans la moelle épinière, le cerveau, le crâne ou les yeux et des flux à faible vitesse existent dans les voies urinaires ou les capillaires par exemple. Pour développer de telles applications futures, une nouvelle génération de microrobots capables de nager efficacement dans un fluide visqueux à très faible nombre de Reynolds est développée.
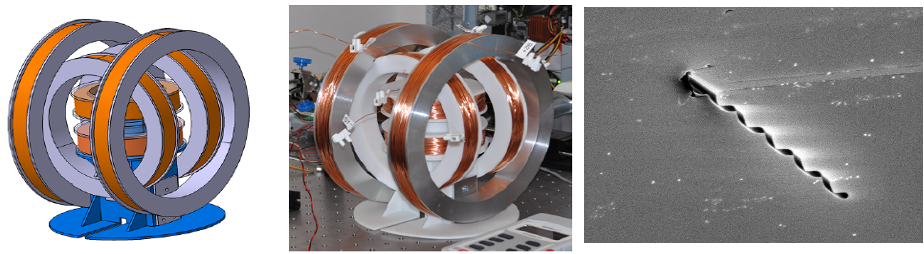
En savoir plus : Multiflag, conception et contrôle de micro-nageurs à flagelles multiples entraînés par des aimants mobiles.
(2) Technique d’actionnement optique
Nous utilisons le pouvoir de la lumière pour manipuler des cellules et des molécules, et laissons l’utilisateur contrôler et ressentir l’interaction du bout des doigts.
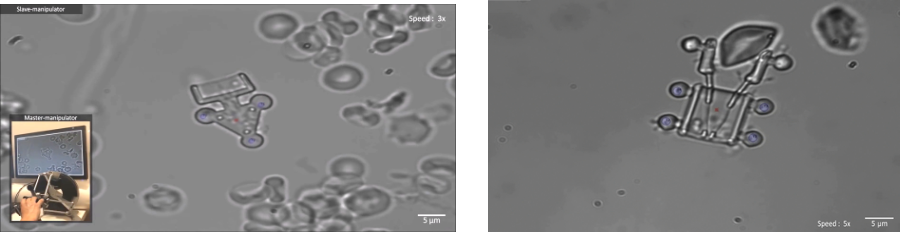
En savoir plus : Robots optiques interactifs : un nouvel instrument pour la biologie
Partenariats et collaborations
– APHP/Hôpital Tenon, Service de biologie de la reproduction-CECOS,
– Institut Pasteur, Diagnostic Test Innovation and Development Core Facility,
– Laboratoire d’Imagerie Biomédicale (LIB), Sorbonne Université,
– Laboratoire Jean Perrin (LJP), Sorbonne Université,
– Robeauté.




