
Context
Mobile microrobots is a highly disruptive research field. The driving idea is to develop untethered devices to navigate and perform non-invasively specific tasks in hard-to-reach sites such as in living organs (in-vivo), or inside enclosed microfluidic devices (in-vitro), for example with live cells. Besides biology-oriented applications, there is also a range of more classical use-cases such as assembly and characterization of small samples and micromachines.
Techniques to produce microscale devices is relatively recent; and providing these wirelessly with power, actuation and sensing is truly challenging. The current technology is not yet sufficiently advanced to fabricate self-contained robots under a millimeter with all these features. There are however a range of physical phenomena that can be exploited to remotely propel and control such devices.
Objectives
We design and develop:
– actuation and sensing techniques for untethered microrobots,
– different strategies for their control and navigation, both autonomous or teleoperated.
We mainly focus on two actuation technologies: magnetic and optical. We also work on vision based sensing, control and haptic teleoperation of such systems.
(1) Magnetic actuation technology
The ability to control magnetic capsules manufactured at a micro-scale would open a broad range of applications, inside the body cavities can be reached: stagnant fluids can be found in the spinal cord, brain and cranium or eyes and low velocity flows exist in the urinary tract or capillaries for instance. To develop such future applications, a new generation of microrobots able to efficiently swim in viscous fluid at very low Reynolds number is developed.
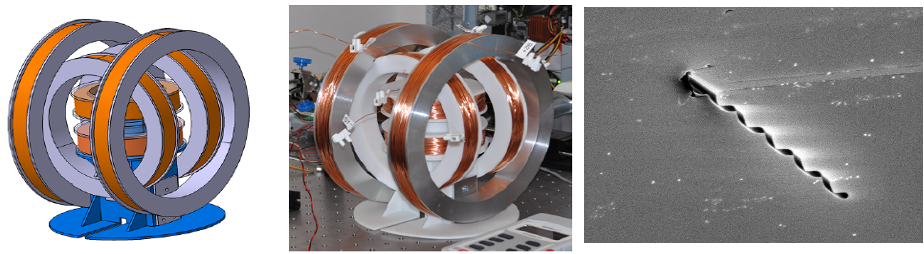
Read more: Multiflag, design and control of multiple flagella micro-swimmers driven by mobile magnets
(2) Optical actuation technology
We are using the power of light to manipulate cells and molecules, and let the user control and feel the interaction with his fingertips.
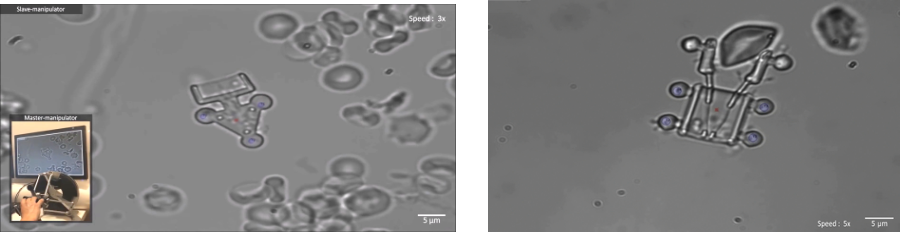
Read more: Interactive optical robots: a novel instrument for biology
Partnerships and collaborations
– APHP/Hospital Tenon, Department of Reproductive Biology-CECOS,
– Biomedical Imaging Laboratory (LIB), Sorbonne University,
– Institut Pasteur, Diagnostic Test Innovation and Development Core Facility,
– Jean Perrin Laboratory (LJP), Sorbonne University,
– Robeauté.




