Projet SOFTMANBOT : Technologie robotique avancée pour la manipulation de matériaux mous dans les secteurs de la fabrication
SOFTMANBOT est un projet axé sur l’utilisateur industriel final, qui fournira un système robotique innovant et global pour la manipulation de matériaux souples et déformables, dans le cadre de processus de production à forte intensité de main-d’œuvre.
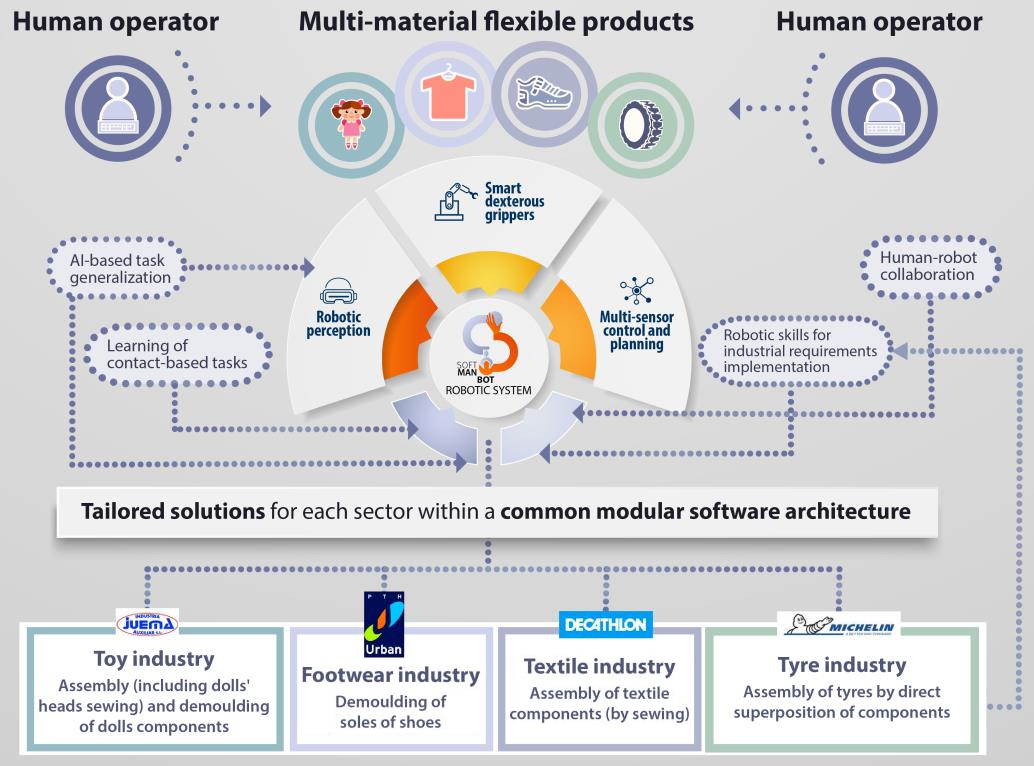
Le système robotique sera composé de trois éléments principaux :
– un système de perception robotique générique (perception du produit et de l’opérateur humain),
– une plateforme de contrôle et de planification multi-capteurs (algorithmes de contrôle avancés pour l’asservissement de la forme et du contact, généralisation des tâches basée sur l’IA),
– et des pinces agiles intelligentes (conception mécanique intelligente qui incarnera les compétences de préhension/manipulation et intégrera des capteurs – principalement tactiles – pour identifier précisément l’état de contact entre le produit et le préhenseur) capables de manipuler des composants souples avec des niveaux élevés de robustesse et de flexibilité.
Le contexte
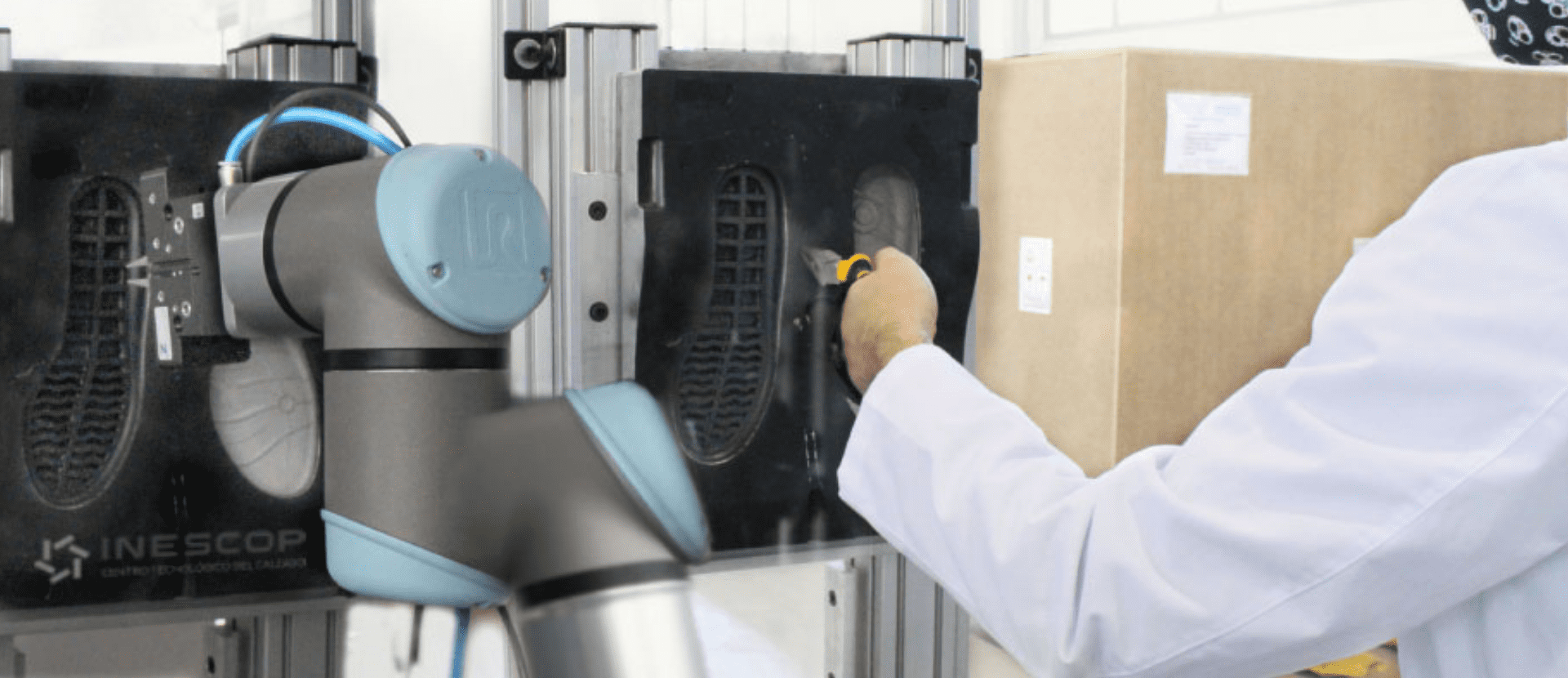
Les robots sont employés depuis longtemps dans des applications de l’industrie automobile, depuis leur introduction dans ce secteur au milieu du siècle dernier. Depuis, les solutions robotiques ont été adoptées par de nombreux secteurs et pour des applications diverses comme dans les domaines de l’aéronautique, l’électronique, l’électroménager, l’industrie alimentaire, l’emballage, les machines textiles, etc. Toutefois, l’adoption de solutions robotiques dans les processus industriels reste faible dans un nombre important de secteurs qui pourraient être la cible idéale de ce type de solutions en raison de la nature de leur travail (tâches répétitives, dangereuses, etc.). Ce fait limite le niveau d’automatisation dans ces industries et restreint le potentiel de croissance de ces entreprises, en particulier dans des secteurs déterminés tels que les industries du textile, de la chaussure ou du jouet, qui doivent réduire leurs coûts de production et augmenter leur productivité en raison de la concurrence acharnée à laquelle ils sont confrontés avec des produits provenant d’autres marchés internationaux tels que l’Asie (Chine, Bangladesh, Inde, etc.).
Les objectifs
L’objectif général du projet est de développer et de démontrer une approche innovante et universelle de la manipulation robotique de matériaux flexibles et déformables, basée sur l’intégration de technologies de fabrication avancées pour l’automatisation de tâches basées sur le contact, soutenue par un système de perception robotique intelligent, une plateforme de planification et de contrôle multi-capteurs et le déploiement de préhenseurs intelligents et à dextérité universelle capables de manipuler des composants souples avec des niveaux élevés de robustesse et de flexibilité.
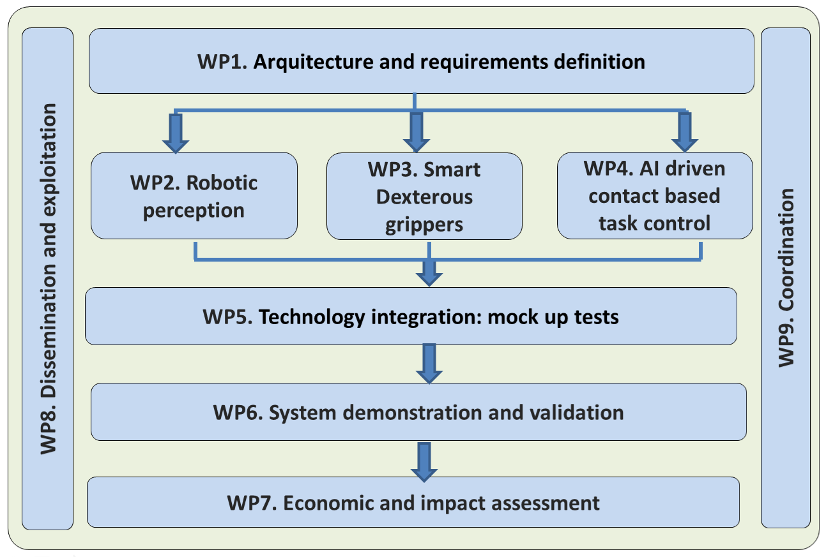
Afin de réaliser l’objectif du projet, le projet SOFTMANBOT se déroulera sur 42 mois avec un plan de travail divisé en 9 Work Packages.
Les résultats
Les résultats attendus sont les suivants :
– Une architecture modulaire et inter-opérable intégrant les différents systèmes et composants matériels et logiciels de la solution robotique SOFTMANBOT ;
– Une plateforme de perception robotique pour la configuration et le suivi en temps réel de la déformation et de l’état de contact de produits flexibles complexes intégrant des stratégies d’apprentissage ;
– Un système de planification et de contrôle multi-capteurs qui, en prenant comme entrées le modèle du produit et le modèle des interactions homme-robot, implémentera les compétences du robot pour gérer la déformation et le contact du produit, établira une séquence d’actions pour réaliser les tâches, définira les sorties requises pour interagir avec l’homme et enfin paramètrera de manière générique les tâches à réaliser ;
– Des préhenseurs intelligents, adroits et peu coûteux pour la manipulation d’objets déformables, intégrant des capteurs (tactiles, de force, de proximité, de vision…) et une structure mécanique intelligente (incarnation des capacités de préhension/manipulation) capables d’exécuter des tâches de manipulation difficiles avec des niveaux élevés de précision, de tolérance aux pannes, de robustesse et de flexibilité dans des environnements difficiles et changeants ;
– Intégration des composants et modules technologiques développés pour la conception de solutions rentables et adaptatives pour des applications industrielles ;
– Validation des résultats du projet de manière rentable dans des conditions industrielles réelles par le biais de 4 démonstrations pilotes dans quatre usines européennes (secteurs du jouet, du textile, de la chaussure et du pneumatique) ;
– Une évaluation environnementale (LCA), économique et sociale de l’ensemble de la solution SOFTMANBOT, y compris une évaluation de l’acceptation par les utilisateurs ;
– Des plans de diffusion, d’exploitation et de communication coordonnés afin de maximiser l’impact technique, social et économique du projet au sein des clusters de démonstration et à travers l’Europe.
Partenariats et collaborations
Ce projet a été financé par le programme de recherche et d’innovation Horizon 2020 de l’Union européenne « Transforming European Industry », sous la convention de subvention nº 869855.

Le consortium est composé de la manière suivante :
– Sigma Clermont, Université Clermont Auvergne – France,
– AIJU Institut Technologique – Espagne,
– INESCOP, Centre de technologie et d’innovation – Espagne,
– Industria Auxiliar Juema – Espagne,
– Sorbonne Université – France,
– Decathlon Produzione Italia – Italie,
– STAM Mastering Excellence – Italie,
– IIT, Institut Italien de Technologie – Italie,
– Zimmer Group – Allemagne,
– PTH URBAN – Espagne,
– Michelin – France.
En savoir plus sur SOFTMANBOT: http://softmanbot.eu/