La robotique représente un défi pour les méthodes d’apprentissage car elle combine les difficultés suivantes : espaces d’état et d’action de grande dimension et continus, récompenses rares, monde dynamique, ouvert et partiellement observable avec des perceptions et des actions bruitées. Leur mise en œuvre est donc délicate et nécessite une analyse poussée des tâches à accomplir, ce qui réduit leur potentiel d’application. Dans le projet Européen DREAM, nous avons défini les bases d’une approche développementale permettant de combiner différentes méthodes pour réduire ces contraintes et donc augmenter les capacités d’adaptation des robots par le biais de l’apprentissage.
Le contexte
La conception de robots nécessite d’anticiper toutes les conditions auxquelles ils peuvent être confrontés et de prévoir les comportements appropriés. Une situation imprévue peut donc provoquer un dysfonctionnement susceptible de se reproduire si les mêmes conditions surviennent de nouveau. Ce manque d’adaptation est un frein à de nombreuses applications de la robotique, en particulier lorsqu’elles ciblent un environnement non contrôlé comme notre environnement quotidien (pour des robots compagnons, par exemple) ou plus généralement pour des robots collaboratifs, c’est-à-dire agissant au contact d’humains. Les méthodes d’apprentissage artificiel pourraient aider à rendre les robots plus adaptatifs, si toutefois elles parviennent à surmonter les multiples difficultés liées au contexte de la robotique. Ce sont ces difficultés spécifiques que ce projet se propose d’aborder.
Les objectifs
L’objectif du projet est d’aider à concevoir des robots en interaction avec un environnement non contrôlé, sur des tâches pour lesquelles le comportement désiré est partiellement connu ou même totalement inconnu.
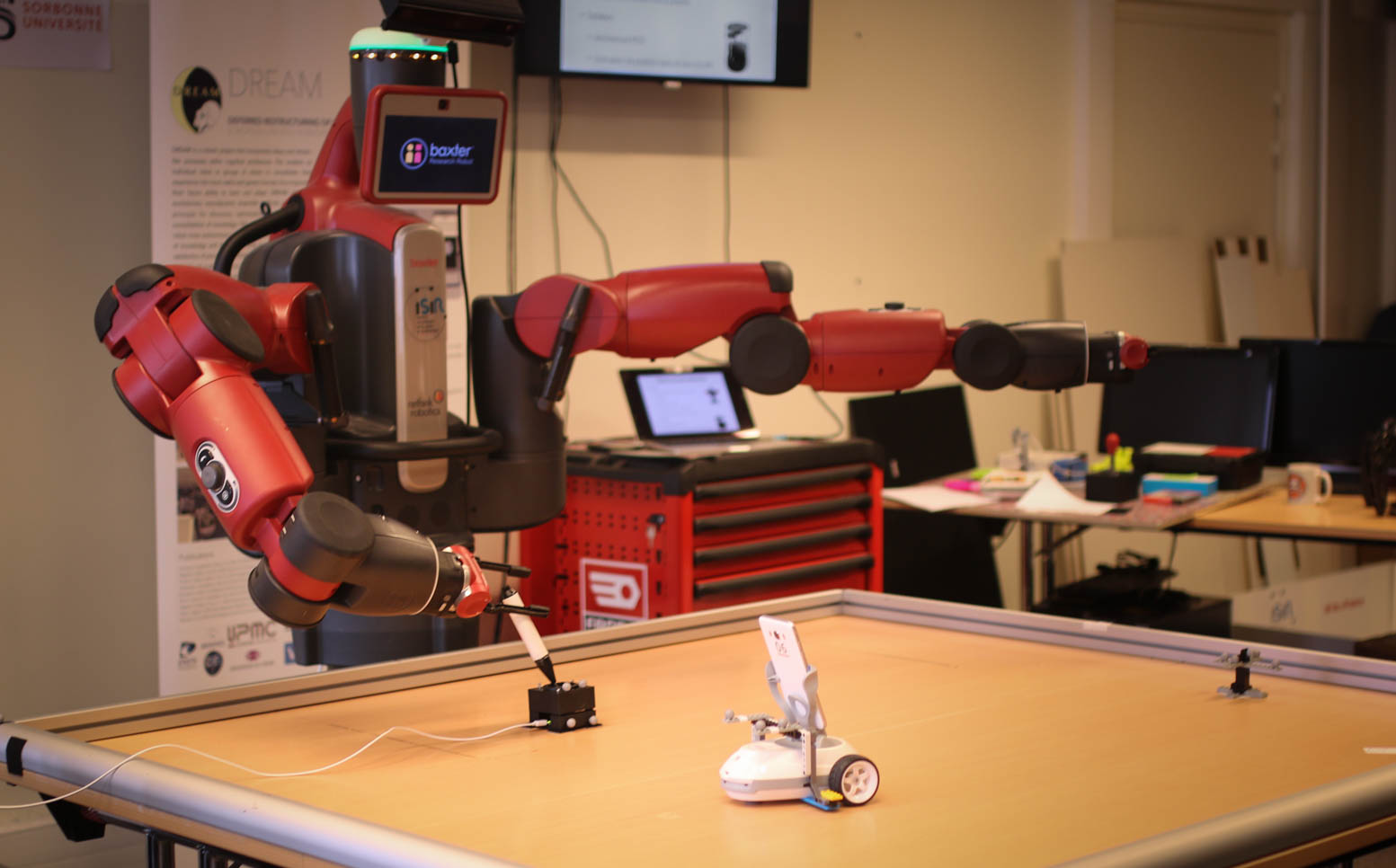
Dans ce contexte, l’apprentissage permet de laisser le robot explorer son environnement en autonomie, afin d’en extraire des représentations sensorielles, sensori-motrices ou purement motrices pertinentes. Par exemple, apprendre à reconnaître des objets, identifier sont ceux qui sont manipulables, apprendre à les saisir, les pousser, les jeter, etc. Explorer le vaste espace sensori-moteur de manière pertinente est central, d’autant plus que nombre d’interactions sont rares (la probabilité d’attraper un objet avec un mouvement purement aléatoire est quasiment nulle).
Nous nous intéressons donc à la construction de ces représentations et nous appuyons sur une approche modulaire et itérative visant à explorer les capacités du robot et à en déduire des représentations qui faciliteront la résolution des tâches qui se présentent, que ce soit avec des méthodes de planification ou d’apprentissage.
Les résultats
La création de représentations d’états et d’actions susceptibles de servir ultérieurement nécessite dans un premier temps de générer des comportements pertinents par rapport aux capacités du robot. Un comportement est pertinent s’il met en avant la capacité du robot à obtenir un effet particulier en interagissant avec son environnement. Sachant que beaucoup de mouvements du robot ne créent aucun effet, découvrir les effets que le robot est susceptible de générer est difficile. A cela s’ajoute la difficulté d’explorer pour apprendre des comportements sans disposer de représentations appropriées.
Nous nous appuyons donc sur des algorithmes d’exploration basés notamment sur de la recherche de nouveauté et des algorithmes de Qualité-Diversité pour générer des comportements d’exploration en grande quantité et en déduire des espace d’état et d’action appropriés pour des apprentissages ultérieurs.
Partenariats et collaborations
Le projet Européen DREAM, coordonné par Sorbonne Université (FET H2020 2015-2018), a lancé cette thématique de recherche au laboratoire (http://dream.isir.upmc.fr/).
Son consortium était composé de :
– l’ENSTA-ParisTech, en France,
– Sorbonne Université, en France,
– l’Université de la Corogne, en Espagne,
– l’Université d’Édimbourg au Royaume-Uni,
– la Vrije Universiteit Amsterdam au Pays-Bas.
Il s’agissait d’un projet académique, sans partenaire industriel.
Elle se poursuit dans le cadre de plusieurs projets visant à appliquer ces travaux à un contexte industriel. La capacité d’adaptation de l’apprentissage est destinée à aider les ingénieurs dans la phase de conception et de mise à jour du comportement d’un robot. Le projet Européen SoftManBot (http://softmanbot.eu) vise des applications à la manipulation d’objets déformables. Il dispose d’un consortium de 11 partenaires, notamment SIGMA, à Clermont-Ferrand, l’IIT à Gênes et des entreprises comme Decathlon et Michelin. Le projet VeriDREAM (https://veridream.eu/), en collaboration avec le DLR, l’ENSTA-Paristech, Magazino GmbH, Synesis et GoodAI, vise à faciliter le transfert de ces méthodes dans un contexte industriel plus large, incluant en particulier des petites et moyennes entreprises avec un focus sur les secteurs de la logistique et du jeu vidéo.







