Lexio Robotics est une solution logicielle dédiée à la manipulation robotique dans des contextes variés, fondée sur une approche d’IA génétique. Elle permet la reprogrammation en langage naturel et l’acquisition autonome de compétences par les robots, levant ainsi les limitations actuelles de la robotique et ouvrant une nouvelle ère pour la robotique B2C et B2B. Ce projet de startup est né à l’ISIR dans le cadre d’une collaboration de recherche sur l’apprentissage robotique en milieu ouvert. L’équipe explore actuellement de nombreux cas d’usage à fort potentiel, allant de la fabrication et de la logistique aux services et à l’usage domestique.

Le contexte
Le projet s’inscrit en réponse à deux problèmes majeurs :
De nombreux secteurs de l’économie peinent à recruter pour des tâches de manipulation répétitives. Industrie manufacturière, logistique, hôtellerie, aide à la personne… de nombreux professionnels s’inquiètent pour la pérennité de leur activité, parfois critique pour la souveraineté du pays.
La robotique ouvre des perspectives pour assurer la continuité de la production dans ces activités. Cependant, malgré les récentes avancées, les robots ne sont pas encore dotés de réelles capacités d’adaptation. Dans les vidéos spectaculaires diffusées sur Internet, les robots sont presque toujours téléopérés. Le manque de solutions permettant aux robots de réaliser des tâches de manipulation avec des capacités d’adaptation demeure un obstacle majeur.
Les récentes avancées en intelligence artificielle laissent entrevoir des perspectives de levée de ces verrous, entraînant une effervescence aussi bien dans le monde académique que dans le monde économique.
Les objectifs
Ce projet de start-up, fortement ancré dans la recherche académique, vise à doter les robots de capacités de manipulation d’objets en environnement ouvert.
Il s’agit en particulier :
– De permettre à des robots d’apprendre rapidement à résoudre de nouvelles tâches avec fiabilité ;
– De permettre à des utilisateurs non experts de se servir des robots et de les reprogrammer par la parole ;
– De développer des solutions logicielles respectant les standards de qualité, d’éthique et de sécurité, afin de permettre le déploiement de robots en environnements ouverts pour des tâches de manipulation.
Les résultats
Les applications possibles couvrent de très nombreux secteurs, allant de la production (industrie manufacturière, logistique) aux services (hôtellerie, aide à la personne).
Le projet s’appuie sur l’état de l’art de l’intelligence artificielle pour la robotique de manipulation, et en particulier sur une série de travaux portant sur les algorithmes génétiques, visant à permettre la reprogrammation aisée des robots.
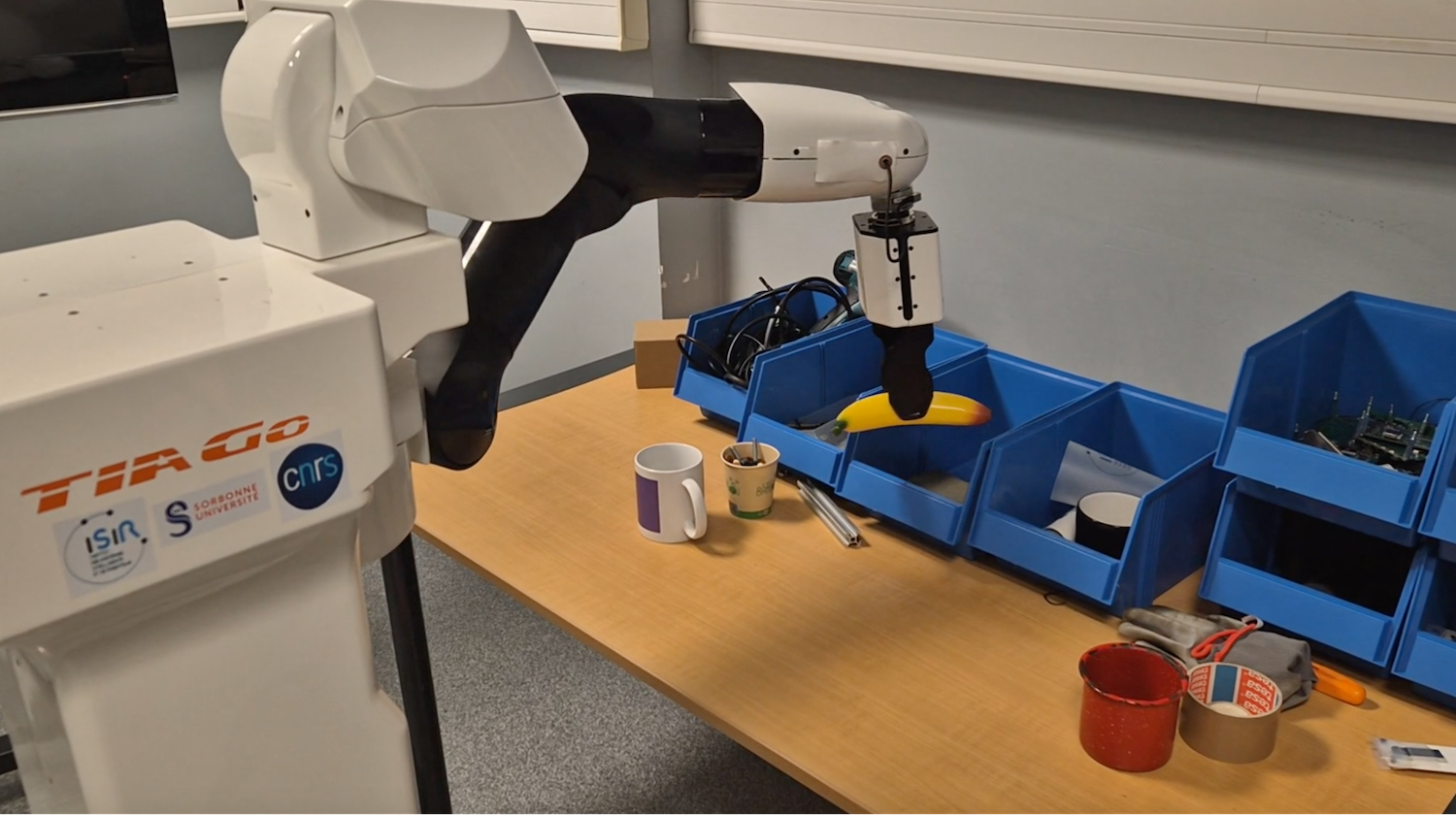
Ces travaux permettent à un robot d’apprendre automatiquement de nouvelles compétences de manipulation au sein d’une scène simulée représentant un environnement opérationnel donné.
Les compétences ainsi acquises – saisie et dépôt d’objets, insertion, empilement, etc. – peuvent ensuite être transférées avec succès sur des robots physiques.
Par ailleurs, les données générées peuvent servir de ressources pour affiner des modèles fondamentaux sur de nouvelles tâches.
Partenariats et collaborations
Le fond scientifique de ce projet s’appuie sur plusieurs collaborations :
– Le projet franco-allemand Learn2Grasp ;
– Le réseau d’excellence européen de l’IA pour la robotique, euROBIN ;
– Le projet européen pour l’apprentissage ouvert, PILLAR ;
– Une collaboration avec l’Imperial College de Londres.
La start-up a vocation à maintenir de forts liens avec la sphère académique, notamment avec l’ISIR et Sorbonne Université. Des discussions sont en cours pour en définir les contours.



