
Des chercheurs de l’ISIR, Sorbonne Université, et du laboratoire Gulliver, ESPCI Paris – PSL, ont conçu des robots qui se déplacent dans ou contre la direction des forces auxquelles ils sont soumis, en particulier lors des collisions, et ce en fonction de leur morphologie uniquement. Ces travaux sont issus du projet « Morphofunctional Swarm Robotics » (projet ANR-18-CE33-0006) et sont présentés dans un article publié dans la revue Science Robotics paru le 22 février 2023.
Un essaim de robots permet d’accomplir des tâches nécessitant une coopération entre plusieurs individus. À ce jour, les essaims de robots sont conçus pour fonctionner exclusivement dans un environnement dilué, c’est à dire en évitant les collisions. Ce n’est pourtant pas le cas dans les organismes vivants, ou l’on peut observer une grande flexibilité dans des environnements aussi bien dilués que très denses, que ce soit pour les cellules, les colonies de bactéries ou de fourmis, les bancs de poissons, les nuées d’oiseaux, ou encore les humains. Cela suggère que des comportements primitifs simples sont suffisants pour obtenir des comportements collectifs, y compris en milieu dense. Les interactions physiques peuvent ainsi être utilisées à l’avantage d’un essaim, y compris s’il est constitué de robots. L’étude et l’exploitation de ces interactions physiques entre robots est l’objet d’un article à l’interface de la robotique, de l’informatique et de la physique publié dans Science Robotics le 22 février 2023 par des chercheurs de l’ESPCI Paris – PSL et de Sorbonne Université.
Dans cet article, les auteurs tirent parti d’une réponse mécanique générique : la tendance qu’a une particule à se réorienter en réponse à une force extérieure. Ils révèlent l’importance de cette réponse morphologique dans différentes tâches robotiques, tant pour un robot seul que pour un essaim de robots. Les auteurs montrent que la façon dont les robots réagissent en cas de collisions dépend de leur corps et leur permet de s’aligner avec ou contre une force externe comme par exemple, un autre robot, un objet ou un mur. En comprenant l’effet des interactions physiques entre les robots et leur environnement, il devient alors possible de définir le comportement collectif qui résultera des multiples collisions entre robots de l’essaim. Selon l’exosquelette qui habille les robots, on peut ainsi observer qu’un robot s’alignera à une force externe tandis qu’un autre s’y opposera. En cas de collision, un robot peut ainsi pousser, ou glisser le long d’un obstacle ou d’un autre robot, et ce uniquement grâce à la dynamique passive induite par sa conception mécanique.
Les auteurs de cet article ont aussi montré qu’il était possible d’apprendre à exploiter les interactions entre robots pour réaliser des tâches de robotique collective nécessitant de la coopération, comme l’agrégation collective dans une zone lumineuse de l’environnement. Pour ce faire, les auteurs décrivent un algorithme d’apprentissage par renforcement décentralisé inspiré de l’apprentissage social : les robots suffisamment proches échangent des informations concernant les stratégies de comportement les plus efficaces pour accomplir la tâche assignée à l’essaim de robots. Les meilleures stratégies se diffusent ainsi de robot à robot, en permettent d’exploiter au mieux les propriétés physiques et les capacités de calcul des robots de l’essaim.
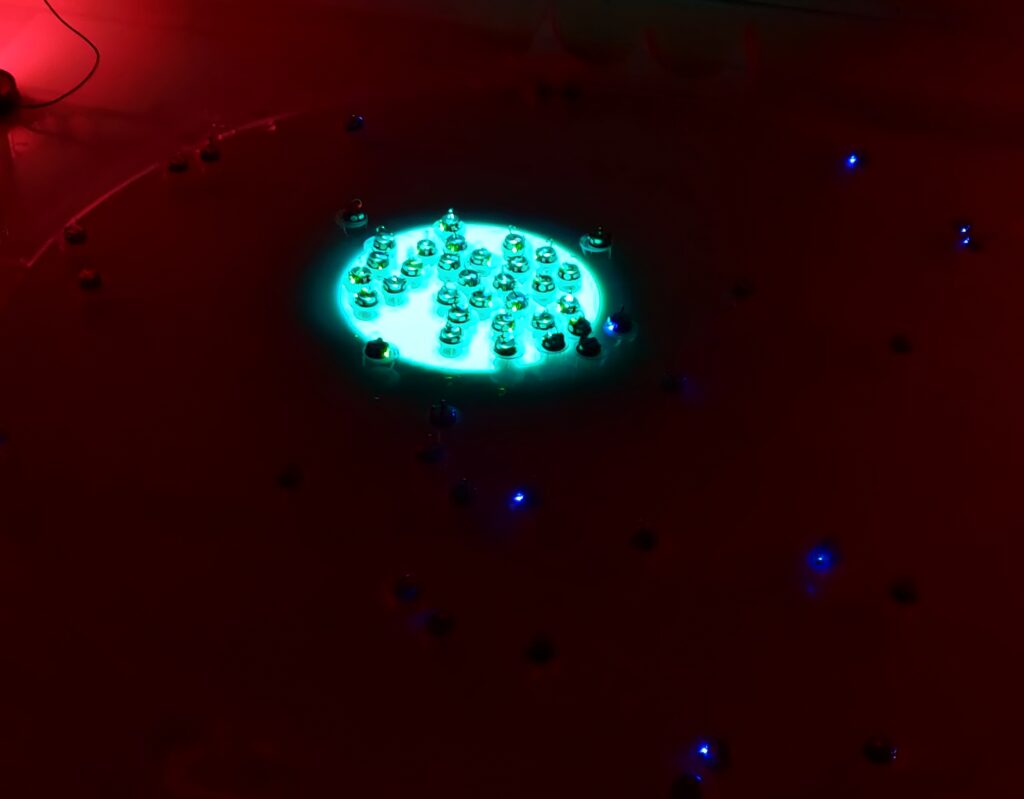
Légende : Coopération entre 64 Morphobots pour une tâche de phototaxie (recherche de lumière). Les morphobots qui se trouvent dans la zone illuminée forme un agrégat qui croît au cours du temps, en exploitant les propriétés données par leurs morphologies. En cas de collision, chaque Morphobot se réoriente naturellement pour faire face à l’objet à l’origine de la force subie. La formation d’un agrégat dans la zone lumineuse résulte simplement d’un ralentissement de la vitesse de déplacement des Morphobots, qui s’opère si l’intensité lumineuse dépasse un seuil appris au cours du temps. La morphologie fait le reste. ©Matan_Yah_Ben_Zion
Les auteurs (dans l’ordre) :
- Matan Yah Ben Zion (Post-doctorant, financé par le projet ANR MSR, actuellement post-doc à l’Université de Tel Aviv) ;
- Jérémy Fersula (doctorant à l’ISIR, financé par SCAI, Sorbonne Université, co-encadrement N. Bredeche (50%) et O. Dauchot (50%)) ;
- Nicolas Bredeche (Professeur des Universités, ISIR, Sorbonne Université) ;
- Olivier Dauchot (Directeur de recherche CNRS, Gulliver lab, ESPCI et Paris PSL).
