
Projet ANR RODEO – Apprentissage profond robuste pour la robotique chirurgicale
La chirurgie assistée par robot est de plus en plus courante pour les opérations délicates, en particulier dans le domaine de la colonne vertébrale où la précision est cruciale. À l’ISIR, une plateforme robotique est déjà dédiée à ce type de chirurgie, permettant aux chirurgiens de manipuler un bras robotisé sophistiqué à 7 degrés de liberté. Le projet RODEO vise à enrichir les capacités de la plateforme et à la doter de technologies avancées pour offrir un accompagnement plus intelligent et intuitif.
Porté par Nicolas Thome, chercheur à l’ISIR et professeur à Sorbonne Université, le projet ANR RODEO est un projet mono-équipe mené par l’équipe projet MLR (Machine Learning and Robotics) de l’ISIR. Il vise à transformer la robotique chirurgicale en intégrant les dernières avancées en intelligence artificielle. Ces travaux de recherche font également l’objet d’un programme d’accélération collaboratif (PAC) du Cluster IA PostGenIA@Paris et sont soutenus par l’Institut Universitaire de France.
Description du projet RODEO par Nicolas Thome, porteur du projet.
Un projet novateur au service de la chirurgie de la colonne vertébrale
Le projet RODEO vise à améliorer l’expérience chirurgicale en enrichissant les capacités des plateformes robotiques actuellement disponibles. Ces robots, utilisés dans des interventions délicates comme l’insertion de vis pédiculaires dans la colonne vertébrale, permettent aux chirurgiens de bénéficier d’un bras robotique à 7 degrés de liberté, équipé de capteurs sophistiqués mesurant la position, la vitesse, la force, la conductivité électrique, et les vibrations.
Aujourd’hui, les robots sont capables de réaliser des tâches automatiques pour certaines procédures simples. Cependant, pour les interventions plus sensibles, un paradigme de co-manipulation est préféré. Cela implique que l’assistant robotique réagisse avec précision aux gestes du chirurgien tout en s’adaptant à son environnement et en assurant la sécurité des patients et du personnel médical.
Des objectifs ambitieux pour une chirurgie plus intelligente
Bien que ce système actuel réponde à certains besoins des chirurgiens, les chercheurs et chercheuses du projet RODEO estiment qu’il est possible d’aller encore plus loin. Aujourd’hui, la plateforme de co-manipulation présente des lacunes, notamment l’absence de certains modules de perception et d’enregistrement, ainsi que l’hypothèse que le patient reste totalement immobile pendant l’opération. Ces limitations peuvent rendre certaines interventions imprécises et potentiellement dangereuses.
L’un des défis majeurs est également lié aux phénomènes physiques complexes, tels que les frottements ou les vibrations du robot, qui ne sont pas toujours bien modélisés par les contrôleurs actuels.
Le projet RODEO ambitionne de surmonter ces obstacles en développant des modèles hybrides d’IA capables d’intégrer ces phénomènes, améliorant ainsi la précision et la sécurité des interventions.
Vers une automatisation intelligente et sécurisée
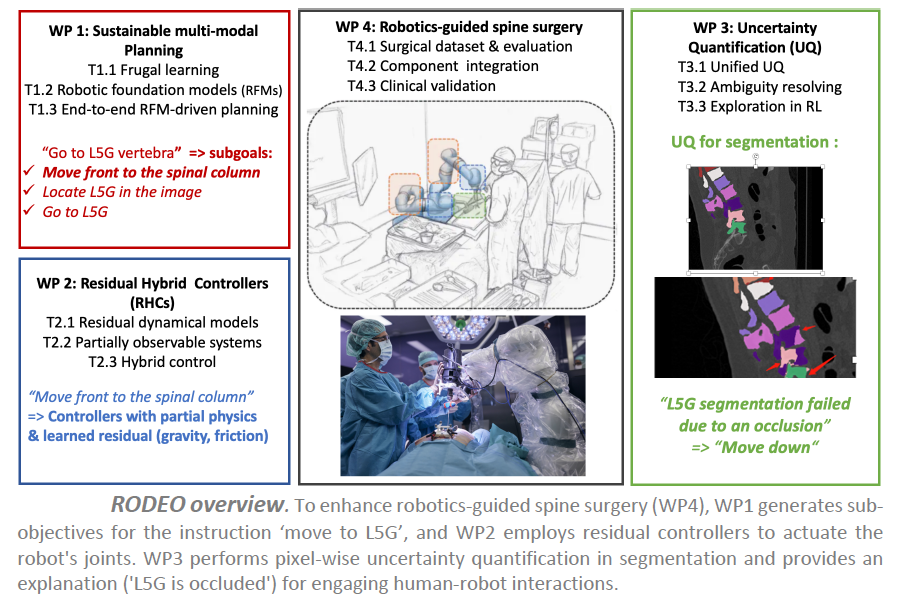
Les membres du projet travaillent à la mise au point de systèmes d’IA plus robustes et fiables, capables d’apprendre et de s’adapter en temps réel aux défis spécifiques rencontrés lors d’une chirurgie. Trois objectifs principaux sont visés dans le cadre des tests pour la chirurgie de la colonne vertébrale :
- Concevoir des contrôleurs hybrides capables d’utiliser l’IA pour apprendre les composants résiduels des contrôleurs actuels difficiles à modéliser, tels que les frottements ou les vibrations ;
- Augmenter la flexibilité du système avec des IA génératives profondes multimodales pour planifier à long terme en utilisant la perception visuelle et des méthodes basées sur l’IA pour enregistrer les scanners CT préopératoires avec les caméras de profondeur opératoires ;
- Améliorer la communication des systèmes d’IA en les dotant de la capacité de quantifier leur propre confiance et d’expliquer leurs décisions à l’équipe chirurgicale de manière compréhensible.
Ces innovations visent à alléger la charge cognitive des chirurgiens, leur permettant de se concentrer pleinement sur l’acte médical tout en bénéficiant d’une assistance robotique optimisée et sécurisée.
La plateforme chirurgicale sur laquelle repose ce projet permettra de confronter les modèles théoriques d’IA générative à des applications concrètes, ouvrant la voie à de nouvelles perspectives pour la robotique médicale. Le projet RODEO pourrait bien redéfinir les standards de la chirurgie assistée par robot, offrant des perspectives d’amélioration tant pour les chirurgiens que pour les patients.
Référent scientifique à l’ISIR : Nicolas Thome, professeur des Universités
Lien vers la page du projet ANR.
Publié le 20/11/2024.
