
RODEO ANR project – Robust deep learning for surgical robotics
Robot-assisted surgery is becoming increasingly common for delicate operations, particularly in the field of spine surgery, where precision is crucial. At ISIR, a robotic platform is already dedicated to this type of surgery, enabling surgeons to manipulate a sophisticated robotic arm with 7 degrees of freedom. The RODEO project aims to enhance the platform’s capabilities and equip it with advanced technologies to provide more intelligent and intuitive support.
Led by Nicolas Thome, a researcher at ISIR and professor at Sorbonne University, the ANR RODEO project is a single-team project run by ISIR’s MLR (Machine Learning and Robotics) project team. It aims to transform surgical robotics by integrating the latest advances in artificial intelligence (AI). This research is also the subject of a collaborative acceleration program run by the PostGenIA@Paris AI Cluster, and is supported by the Institut Universitaire de France.
Description of the RODEO project by Nicolas Thome, project leader.
An innovative project for spinal surgery
The RODEO project aims to enhance the surgical experience by enriching the capabilities of currently available robotic platforms. These robots, used for delicate procedures such as the insertion of pedicle screws into the spine, enable surgeons to benefit from a 7-degree-of-freedom robotic arm, equipped with sophisticated sensors measuring position, speed, force, electrical conductivity, vibrations.
Today, robots are capable of performing automatic tasks for certain simple procedures. However, for more sensitive interventions, a co-manipulation paradigm is preferred. This requires the robotic assistant to react precisely to the surgeon’s gestures, while adapting to the environment and ensuring the safety of patients and medical staff.
Ambitious goals for smarter surgery
Although the current system meets some of the needs of surgeons, the RODEO researchers believe that it is possible to go even further. Today, the co-manipulation platform has a number of shortcomings, including the absence of certain perception and recording modules, and the assumption that the patient remains completely immobile during the operation. These limitations can make certain interventions imprecise and potentially dangerous.
One of the major challenges is also linked to complex physical phenomena, such as robot friction and vibration, which are not always well modeled by current controllers.
The RODEO project aims to overcome these obstacles by developing hybrid AI models capable of integrating these phenomena, thereby improving the accuracy and safety of interventions.
Towards intelligent, safe automation
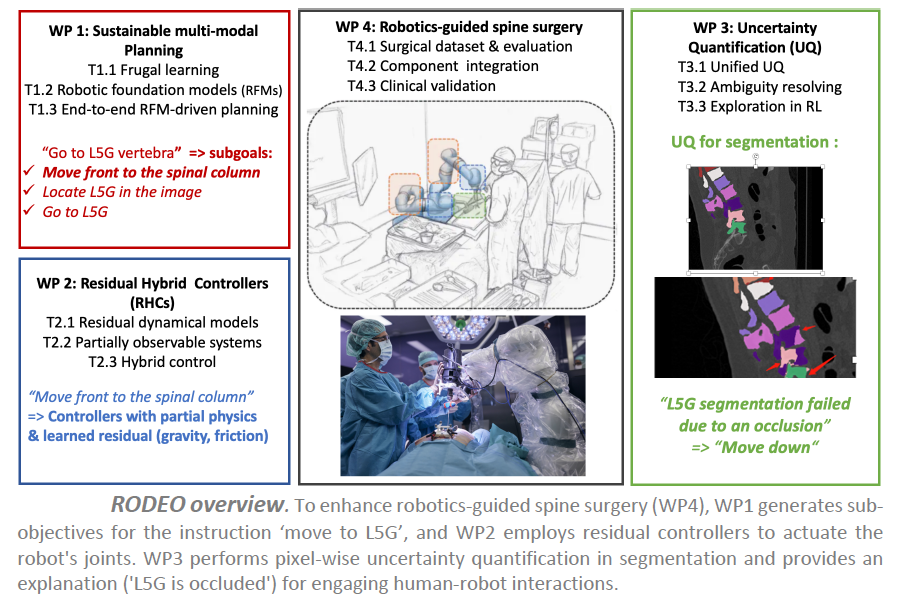
Project members are working to develop more robust and reliable AI systems, capable of learning and adapting in real time to the specific challenges encountered during surgery. There are three main objectives in testing for spine surgery:
- Design hybrid controllers capable of using AI to learn the residual components of today’s hard-to-model controllers, such as friction and vibration;
- Increase system flexibility with multimodal deep generative AI for long-term planning using visual perception and AI-based methods for registering preoperative CT scans with operative depth cameras ;
3. Improve the communication of AI systems by equipping themwith the ability to quantify their own confidence and explain their decisions to the surgical team in an understandable way.
These innovations aim to lighten the cognitive load on surgeons, enabling them to concentrate fully on the medical act while benefiting from optimized and secure robotic assistance.
The surgical platform on which this project is based will enable theoretical models of generative AI to be tested in real-life applications, opening up new perspectives for medical robotics. The RODEO project could well redefine the standards of robot-assisted surgery, offering prospects for improvement for surgeons and patients alike.
Scientific referent at ISIR: Nicolas Thome, University Professor.
Link to project ANR page.
Published on 20/11/2024.
