Developed at ISIR, the Lexio Robotics project is exploring ways to make robots more autonomous and capable of adapting to a variety of environments. Its key idea is to use a type of artificial intelligence known as “genetic” AI to offer a software solution that enables robots to learn new tasks without complex programming and to adapt to unfamiliar situations.
This start-up project, winner of the 2025 edition of the French government’s innovation competitions, is the result of academic collaborations on a European scale. It is based on several research initiatives such as the Franco-German Learn2Grasp project (a Franco-German project on robotic grasping), the euROBIN network dedicated to AI for robotics, the European PILLAR programme on open learning, and a collaboration with Imperial College London.
This academic work has laid the technological foundations for the future start-up, which is currently exploring concrete applications in various sectors, from manufacturing to logistics, services and personal assistance.
A response to labour shortages in many sectors
Industry, logistics, hospitality, personal services… Many economic sectors are facing recruitment difficulties for repetitive manual tasks. This situation is creating tensions in certain essential activities.
Robotics could help meet these needs, but current solutions still have limitations. Robots often remain poorly adaptable, and the most impressive demonstrations visible online are still based on remote operation. This lack of flexibility prevents the widespread deployment of robotics in real-world, unstructured contexts.
This is the context for the Lexio Robotics project, which seeks to better equip robots with adaptive and autonomous learning capabilities.
Learn quickly and effectively, without technical expertise
Lexio Robotics aims to enable robots to learn autonomously how to manipulate objects in open environments, while making their use accessible to everyone, from manufacturers to individuals.
The future start-up has three key ambitions:
– Enable robots to learn new manipulation tasks quickly and reliably;
– Make it easier for non-expert users to reprogram robots, particularly through natural language;
– Develop safe and ethical software solutions that are compatible with open environments.
From simulation to the real world: promising results
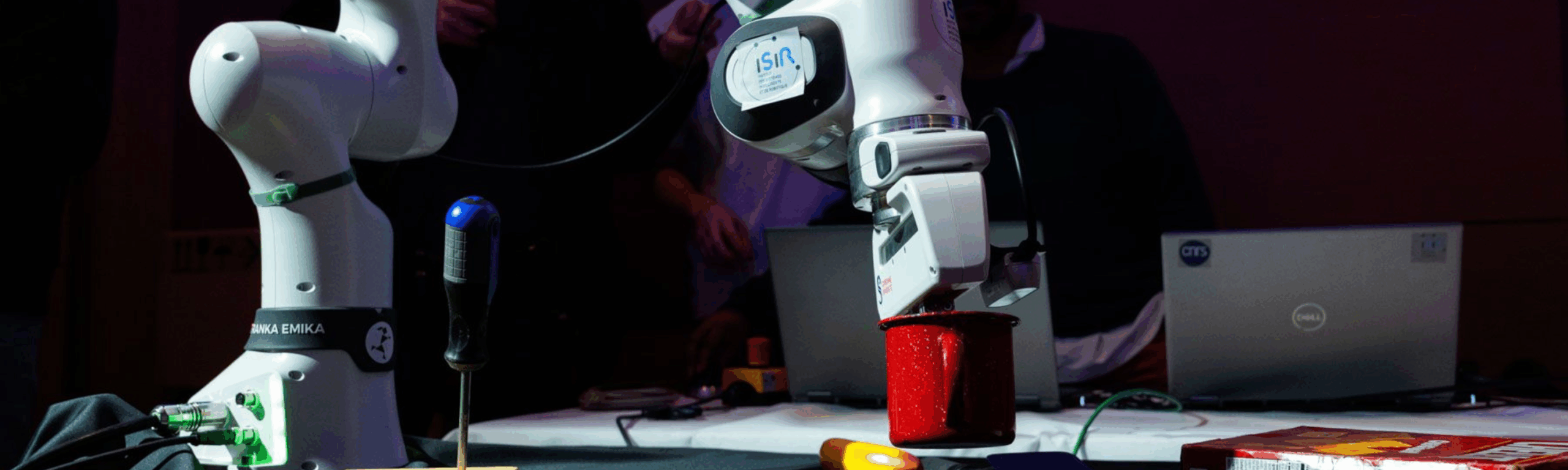
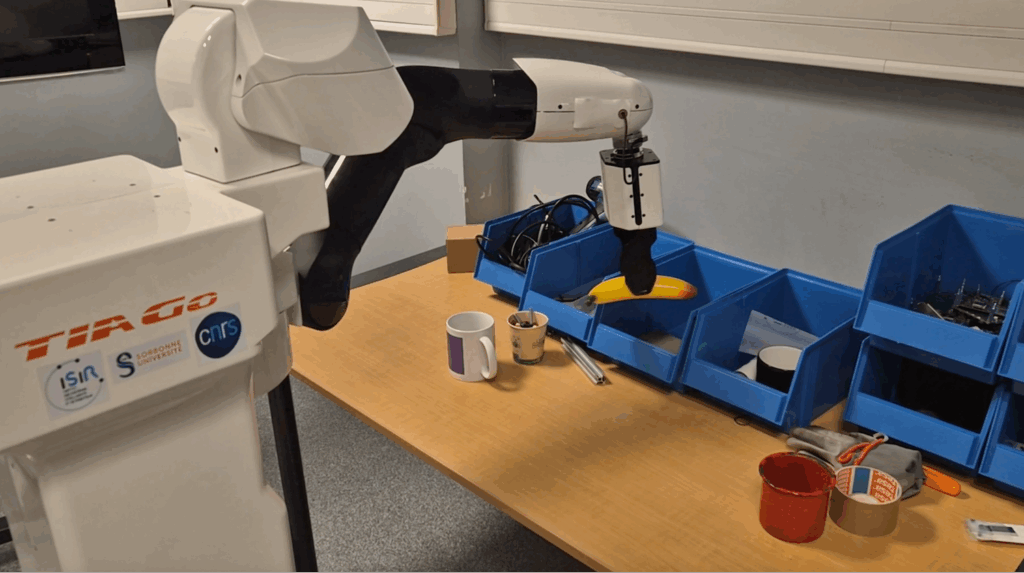
The approach is based on work on genetic algorithms, which enable robots to virtually experiment with actions in simulated environments. The skills acquired, such as grasping, inserting or stacking objects, can then be transferred to physical robots. This principle promotes progressive learning and reduces the need for expert human intervention.
The work behind Lexio Robotics has demonstrated a robot’s ability to automatically learn new manipulation skills in simulated environments. These skills, such as grasping, depositing, stacking or inserting objects, can then be successfully transferred to physical robots operating in real environments.
The data generated during this learning process is also used to refine fundamental artificial intelligence models.

Rooted in academic research, Lexio Robotics illustrates the dynamic transfer between research and industrial development. The project was also recognised in the France 2030 programme’s innovation competitions, for which Johann Huber, a researcher at ISIR, received the i-PhD prize, which rewards young scientists who have a project to start a business based on their work.
Building on recent advances in artificial intelligence, the Lexio Robotics project seeks to make manipulation robotics more flexible, accessible and reliable for uses ranging from industrial production to everyday assistance.
Scientific contact: Johann Huber, postdoctoral researcher
Published on 01/12/2025.
