Ce projet fait le lien entre l’apprentissage machine et les sciences cognitives afin de permettre une meilleure collaboration entre humain et robot. L’objectif global d’OSTENSIVE est de permettre aux robots d’effectuer au mieux des tâches en collaboration avec des humains, grâce à une meilleure communication et compréhension entre les deux acteurs. En intégrant le point de vue de l’humain dans la perception, la décision et la génération d’actions, nous visons à développer des modèles capables de s’adapter aux états mentaux et aux comportements des humains.
En collaboration avec l’Inria et le LAAS, nous souhaitons développer des modèles d’apprentissage dits directs et inverses permettant d’intégrer la communication à l’action, depuis les modèles de raisonnement et de planification jusqu’à la réalisation de mouvements.
Le contexte
Lorsqu’un humain effectue une démonstration, celle-ci ne se limite pas aux objets manipulés. Elle s’accompagne également d’indices communicatifs ostensibles, tels que le regard et/ou des modulations spatio-temporelles. Ces comportements, comme les pauses, les répétitions et les exagérations, peuvent paraître sous-optimaux, mais ils sont utilisés par l’humain pour communiquer.
Les sciences cognitives abordent ce défi de la communication en action en s’inspirant du langage. La plupart des approches de l’interaction humain-robot supposent une interprétation littérale des comportements, ce qui limite fortement l’interprétation des actions et des intentions de l’autre. Il est nécessaire de disposer de modèles directs et inverses capables de générer un contenu pertinent pour l’autre (humain ou robot) et d’interpréter correctement ses actions.
Les objectifs
Le projet OSTENSIVE vise à développer des modèles directs et inverses, basés sur l’apprentissage machine et conditionnés par des mécanismes de raisonnement relatifs à l’humain. Nos recherches couvrent un large éventail de domaines, allant du développement de modèles de haut niveau pour le raisonnement et la planification des tâches à la mise en œuvre d’une planification de mouvement de bas niveau pour une exécution physique précise.
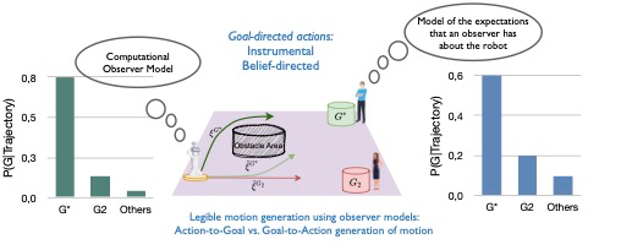
En nous appuyant sur des approches issues des sciences cognitives, nous étudierons les situations, les indicateurs et les métriques permettant de déterminer les conditions dans lesquelles les humains interagissent avec ces modèles et en tirent profit, grâce à de nouvelles approches d’évaluation en temps réel de la prise de perspective de l’observateur. Nous développerons de nouveaux modèles capables de synthétiser des mouvements robotiques ostensifs et interactifs, ainsi que des représentations probabilistes d’actions ostensives apprises à partir de démonstrations humaines.
Les résultats
Notre objectif est d’adapter et d’étendre les protocoles expérimentaux utilisés pour étudier la cognition sociale. Les applications couvrent de nombreux secteurs, notamment la navigation sociale et la manipulation mobile en environnement partagé. Nous souhaitons garantir que les robots puissent se déplacer avec fluidité et accomplir des tâches aux côtés des humains dans des scénarios réalistes, grâce à l’intégration d’actions ostensives sur différentes plateformes robotiques.
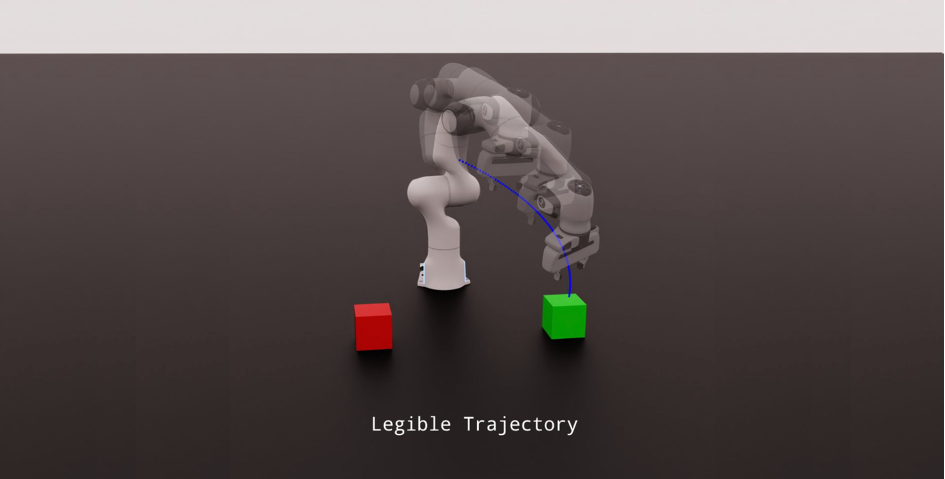
Les travaux d’OSTENSIVE, menés à plusieurs niveaux, visent notamment à permettre aux robots de comprendre et d’interpréter correctement les intentions humaines, de définir des plans explicables pour accomplir des tâches et d’effectuer des actions de manière compréhensible pour un observateur humain.
Après approbation éthique, nous mènerons des expériences approfondies afin de valider les capacités de communication ostensive des robots auprès de participant-es novices qui devraient tirer le meilleur parti de ces capacités pour accomplir une tâche avec le robot.
Partenariats et collaborations
OSTENSIVE est une initiative collaborative entre l’ISIR, le LAAS-CNRS et l’INRIA visant à créer un cadre unifié pour l’interaction humain-robot. L’ISIR coordonne ce projet ANR OSTENSIVE (ANR-24-CE33-6907-01).
ISIR – Équipe ACIDE
– Développement de modèles d’inférence directe et inverse, avec des travaux sur la compréhension de l’intention humaine et la prédiction de l’impact des actions d’un agent sur la perception humaine.
– Référent OSTENSIVE : Mohamed Chetouani
INRIA (Nancy) – Équipe LARSEN
– Étude des mouvements ostensifs, grâce à des outils tels que les primitives de contrôle et les politiques robotiques.
– Référente OSTENSIVE : Serena Ivaldi
LAAS-CNRS (Toulouse) – Équipe RIS
– Réalisation de méthodes de planification prenant en compte la présence des humains, par l’utilisation de la théorie de l’esprit et de la prise de perspective d’un observateur externe.
– Référent OSTENSIVE : Rachid Alami