

Discover ISIR

Our teams composed of researchers from various disciplines, around objects, applications and shared scientific matters within the two major challenges of robotics: interactivity with human persons and autonomy.
The advent of artificial intelligences and robots is inducing profound transformations in our societies. ISIR researchers help to anticipate them by working on the autonomy of machines and their ability to interact with human beings.

Discover all the job, internship, PhD and post-doctorate offers of the Institute for Intelligent Systems and Robotics.
En ce moment
“La Science taille XX elles” honours two ISIR scientists
The CNRS Paris-Centre and Villejuif delegations, in partnership with the Femmes & Sciences association, are presenting the 2025 edition of the temporary exhibition “La Science taille XX elles”. Among the winners of this new edition are two women researchers from ISIR. On 23 June, the CNRS Paris-Centre and Île-de-France…
Franco-Moroccan Research Center Summer School : Sustainable AI for Resource-Constrained Healthcare, from 7 to 11 July 2025
The Franco-Moroccan Research Center Summer School will be held at SCAI, Sorbonne University, Paris, from 7 to 11 July 2025. The new Franco-Moroccan Research Center Summer School offers immersive, interdisciplinary training for students and researchers from France and Morocco. The theme for 2025 is Sustainable AI for Resource-Constrained Healthcare. From…
9th Summer School on Computational Interaction from 16 to 20 June 2025
The 9th Summer School on Computational Interaction, ACM Europe School will be held at Sorbonne Université (Campus Pierre et Marie Curie) on June 16 – 20, 2025. This summer school teaches HCI students, researchers, and industry professionals computational methods and their application in user interface design, interactive systems, user modeling, and more….
A look back at ISIR’s Young Scientists’ Day
On Monday 26 May 2025, the ISIR Young Scientists’ Day was held, a special event dedicated to doctoral students, post-docs and engineers. Over the course of the day, oral presentations enabled PhD students to share their work, complemented by a poster session open to all members of the laboratory….
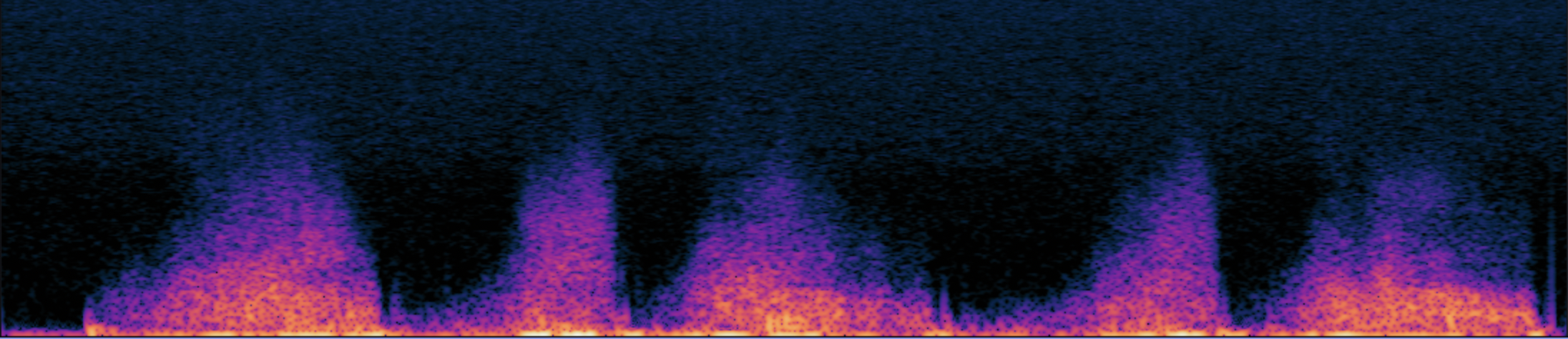
Translating affective touch into sound
In an era where remote interactions are becoming increasingly common, driven by the rise of digital technologies, virtual reality, and periods of social distancing, a key question remains: how can we maintain emotional connection without physical contact? Social touch, which plays a crucial role in psychological and physiological well-being,…

Towards a new generation of multisensory haptic interfaces
While digital interfaces offer increasing quality in the visual and auditory domains, the tactile dimension is still largely under-exploited. The MAPTICS project is in line with this observation, with the aim of rethinking the role of touch in our interactions with screens. Current human-machine interfaces provide information to users…
The 10th IFAC Symposium on Mechatronic Systems and the 14th IFAC Symposium on Robotics from 15 to 18 July 2025
The joint Symposia of the 10th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2025) and the 14th IFAC Symposium on Robotics (ROBOTICS 2025) will be held in Paris from 15 to 18 July 2025. This unique event provides an exceptional opportunity for researchers, engineers, students, professionals, and experts in the fields of mechatronics,…

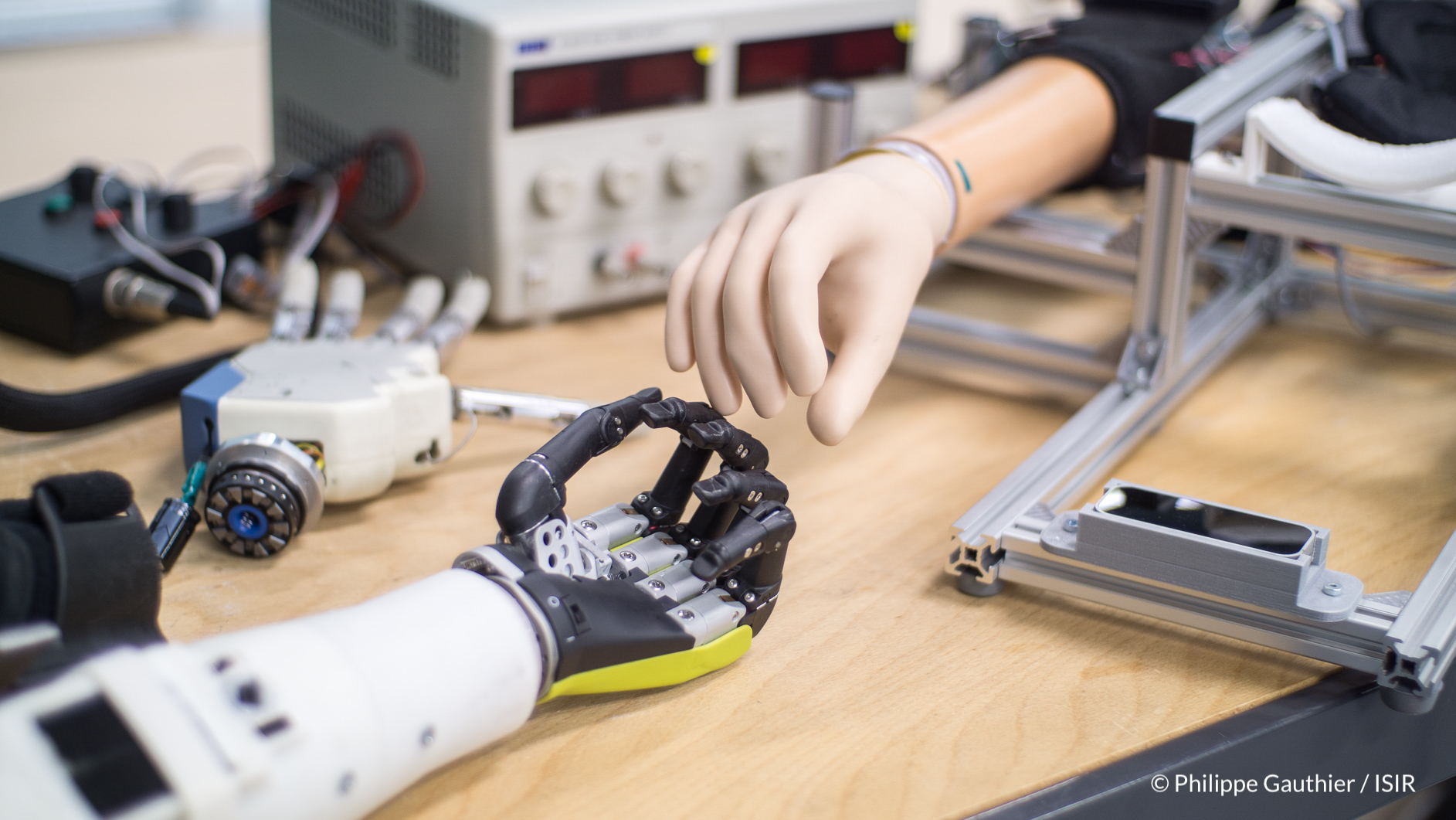
EXTENDER : piloter un bras robotique pour développer l’autonomie des personnes en situation de handicap
Source de l’article : CNRS Le projet EXTENDER a pour objectif de faciliter le quotidien des personnes en situation de handicap en développant de nouveaux modes de commande de bras robotique, adaptables à chaque utilisateur. Les sept partenaires impliqués entendent ainsi s’appuyer sur la technologie et la recherche pour…

Projection et débat : “Les scandaleuses” de Cécile Delarue
La cellule égalité-parité de l’ISIR vous invite à la projection du documentaire “Les Scandaleuses”, de Cécile Delarue, qui retrace soixante-dix ans de luttes à travers des portraits de femmes qui ont osé défier les normes, souvent au prix du scandale. La projection sera suivie d’un échange avec la réalisatrice Cécile Delarue….

Enhancing human-agent interaction for more engaging dialogue
Catherine Pelachaud’s research focuses on improving human-agent interactions by developing virtual agents capable of communicating more fluently and interactively. By exploring innovative approaches such as real-time adaptation and social touch, her work aims to make dialogues more personalized and engaging. Through international collaborations and projects like the Greta platform,…
