Projet RODEO – Apprentissage profond robuste pour la robotique chirurgicale
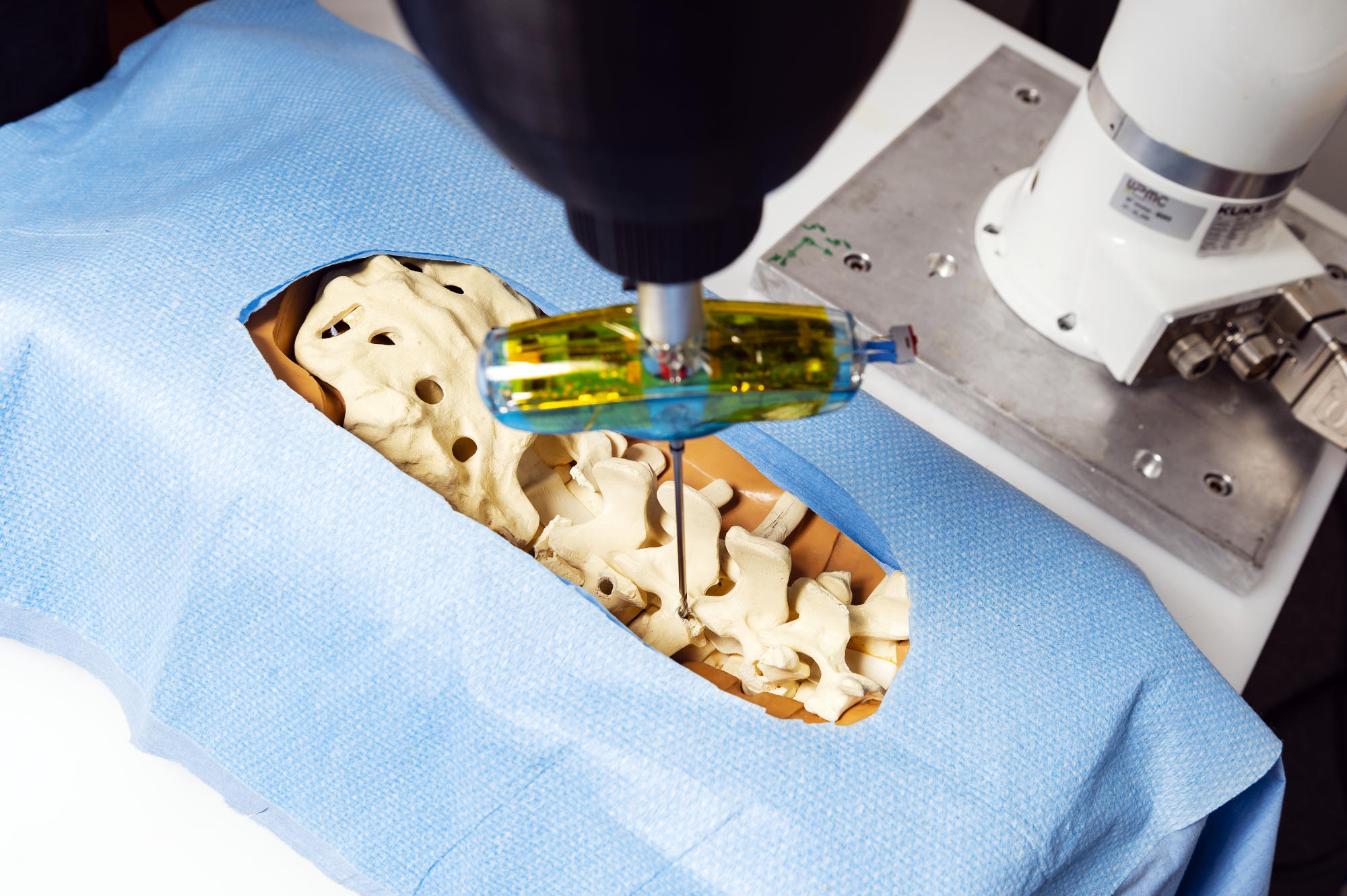
Le projet ANR RODEO vise à transformer la robotique chirurgicale en intégrant les dernières avancées en intelligence artificielle (IA). Le cadre d’application est la chirurgie guidée par robot pour la colonne vertébrale, basée sur une plateforme chirurgicale disponible à l’ISIR.
Dans ce contexte, un bras robotique à 7 degrés de liberté (DoFs) est équipé de divers capteurs (position, vitesse, force, conductivité électrique, vibrations) et utilisé pendant des interventions chirurgicales, comme l’insertion de vis pédiculaires dans la colonne vertébrale. Cette plateforme robotique actuelle utilise un ensemble de lois de commande déjà implémentées (e.g., contrôle de position, de vitesse, de force) pour exécuter des tâches ou sous-tâches chirurgicales, comme le perçage d’une trajectoire préliminaire pour le placement des vis pédiculaires. Avant l’opération, un scanner 3D du patient est réalisé, permettant au chirurgien de définir la procédure médicale à suivre pendant la chirurgie.
Bien que des contrôleurs entièrement automatiques puissent être utilisés pour certaines sous-tâches sûres, les chirurgiens préfèrent un paradigme de co-manipulation pour les opérations sensibles, où les robots chirurgicaux assistent les procédures médicales. Dans ce cas, l’assistant robotique doit réagir fidèlement aux instructions du chirurgien tout en garantissant la sécurité du patient et du personnel médical, et s’adapter à l’environnement.
Le contexte
Bien que le système actuel de co-manipulation soit utile et réponde à certains besoins des chirurgiens, il peut être considérablement amélioré pour enrichir l’expérience chirurgicale. La plateforme chirurgicale de l’ISIR manque de modules de perception et d’enregistrement, et la procédure actuelle suppose que le patient ne bouge pas une fois positionné pour la chirurgie et que la colonne vertébrale est rigide. Cela peut rendre le transfert d’informations préopératoires complexe, imprécis et dangereux pour le patient. De plus, les contrôleurs actuels ne représentent pas certains phénomènes physiques complexes lors de la co-manipulation, comme les frottements du robot, les vibrations ou la compensation gravitationnelle, tous cruciaux pour des interventions chirurgicales précises.
Les objectifs
Le projet RODEO vise à développer la prochaine génération d’IA génératives profondes pour surmonter les principaux défis mentionnés. L’objectif est de concevoir des systèmes d’IA avec une robustesse améliorée en termes de flexibilité et de fiabilité, tout en restant durables, ainsi que des modèles hybrides capables d’intégrer des connaissances physiques du monde.
L’hypothèse centrale de la recherche est que ces améliorations peuvent conduire à une avancée majeure dans la robotique chirurgicale. Des systèmes d’IA plus fiables peuvent améliorer leur acceptation par les experts médicaux et les patients, notamment en leur permettant d’évaluer leur propre confiance ou d’expliquer leurs décisions de manière compréhensible. Les modèles hybrides et durables pourraient considérablement améliorer le niveau d’automatisation dans la co-manipulation robot/chirurgien, réduisant ainsi la charge cognitive des chirurgiens et leur permettant de se concentrer entièrement sur les interventions médicales, ce qui améliorerait les procédures chirurgicales et les soins aux patients.
Les résultats
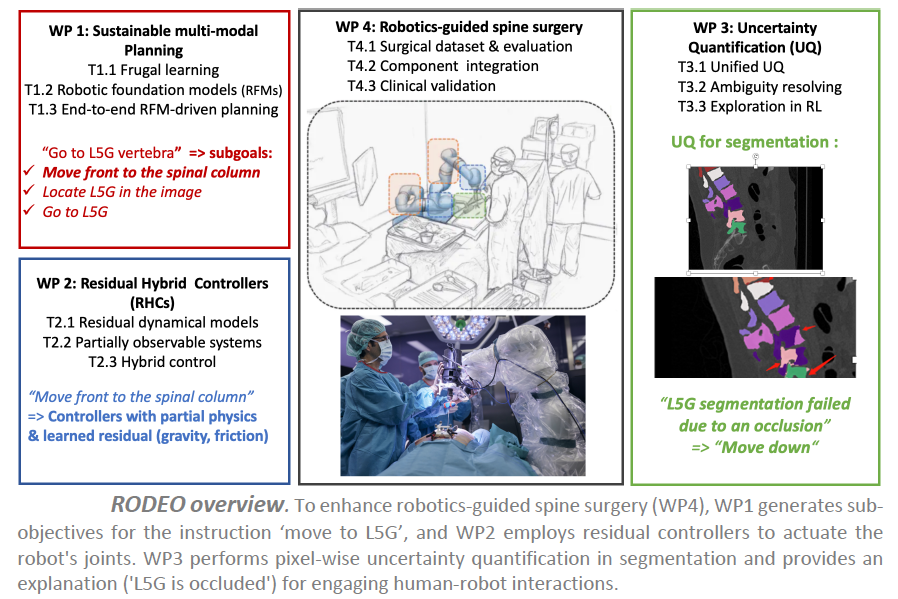
Dans notre cadre de test pour la chirurgie de la colonne vertébrale, nous attendons des améliorations majeures dans trois domaines principaux :
– concevoir des contrôleurs hybrides capables d’utiliser l’IA pour apprendre les composants résiduels des contrôleurs actuels difficiles à modéliser, tels que les frottements ou les vibrations ;
– augmenter la flexibilité du système avec des IA génératives profondes multimodales pour planifier à long terme en utilisant la perception visuelle et des méthodes basées sur l’IA pour enregistrer les scanners CT préopératoires avec les caméras de profondeur opératoires ;
– doter les systèmes d’IA de la capacité de quantifier leur propre confiance et d’expliquer leurs décisions à l’équipe chirurgicale de manière compréhensible.
Partenariat et collaboration
Le projet ANR RODEO est un projet mono-équipe mené par l’équipe projet MLR (Machine Learning and Robotics) de l’ISI, porté par Nicolas Thome, chercheur à l’ISIR et professeur à Sorbonne Université.










