
ISIR recently acquired an Atalante X exoskeleton from Wandercraft to add to its range of equipment. This exoskeleton represents a technological breakthrough in the field of robotics and walking assistance, offering innovative possibilities for studying and improving human-machine interfaces. This platform will enable ISIR researchers to study various methods of gait control and assistance, explore new approaches and respond to new challenges.
The Atalante X exoskeleton from Wandercraft
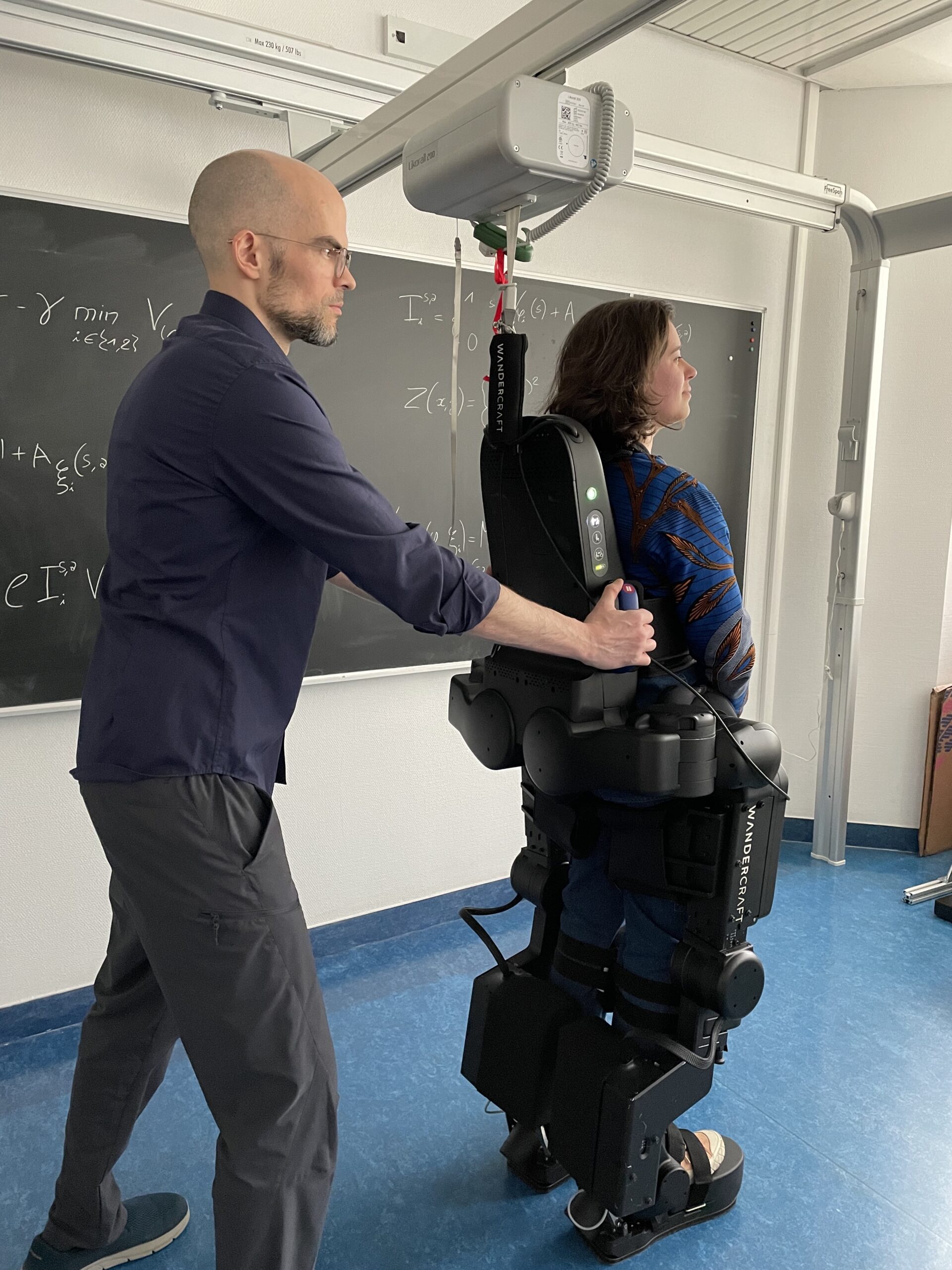
The Atalante X exoskeleton from Wandercraft represents a breakthrough in medical robotics. Designed to improve the mobility of people with partial or complete paralysis of the lower body, this equipment incorporates algorithms designed to provide precise and stable support. The exoskeleton enables its user to walk independently and without the use of crutches, freeing up the upper body for other tasks. Its design ensures comfort and safety, while its modularity means it can be customised to the dimensions of each user. By combining cutting-edge technology and human-centred design, the Wandercraft exoskeleton opens up new horizons in rehabilitation and improving the quality of life of people with disabilities.
Optimising exoskeleton trajectories using reinforcement learning
Nicolas Perrin-Gilbert, CNRS research fellow, will be in charge of the platform at ISIR. His work will focus on developing algorithms to improve the fluidity, responsiveness and adaptability of the exoskeleton’s movements. In particular, an approach based on reinforcement learning will lead to the personalisation of trajectories according to the specific characteristics of each user. This type of learning enables the controlled system to gradually refine its decisions by interacting with its environment, adapting to unforeseen conditions of use and improving over time. However, its effectiveness in practice may be limited by the need to collect a large amount of data before obtaining an effective control policy. The aim of this research will be to study and implement a frugal approach that will increase the efficiency of learning and enable faster customisation of system control, i.e. within a few hours of use.
The platform equipped with the Wandercraft Atalante X exoskeleton will be open to all the laboratory’s researchers for exploratory research work on this equipment. This will encourage interdisciplinary collaboration and make it possible to explore a wide range of potential applications for the exoskeleton. Researchers will have the opportunity to test new approaches and deepen their understanding of the interactions between human and machine in the context of assisted mobility.
Scientific contact at ISIR: Nicolas Perrin-Gilbert, CNRS research fellow
Published on 30 May 2024
